
1Ż«åóė├▓ó│§╩╝╗»▌S
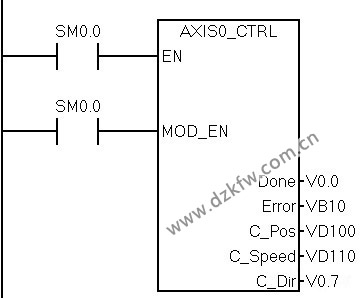
AXISx_CTRL ūė│╠ą“Ż©┐žųŲŻ®åóė├║═│§╩╝╗»▀\äė▌SŻ¼ĘĮĘ©╩Ūūįäė├³┴Ņ▀\äė▌S├┐┤╬CPU Ė³Ė─×ķ RUN ─Ż╩ĮĢr╝ė▌dĮMæB/Ū·ŠĆ▒ĒĪŻ
į┌ĒŚ─┐ųąų╗ī”├┐Śl▀\äė▌S╩╣ė├┤╦ūė│╠ą“ę╗┤╬Ż¼▓ó┤_▒Ż│╠ą“Ģ■į┌├┐┤╬Æ▀├ĶĢrš{ė├┤╦ūė│╠ą“ĪŻ╩╣ė├ SM0.0Ż©╩╝ĮKķ_åóŻ®ū„×ķ EN ģóöĄĄ─▌ö╚ļĪŻ
╣▄─_║¼┴xŻ║
MODEŻ║ åóė├─ŻēKĪŻ1=┐╔░l╦═├³┴ŅŻ╗0=ųąų╣▀MąąųąĄ─╚╬║╬├³┴Ņ
Done Ż║═Ļ│╔ś╦ųŠ╬╗
Error Ż║Õeš`┤·┤aŻ©ūų╣ØŻ®
C_Pos Ż║▌SĄ─«öŪ░╬╗ų├Ż©Į^ī”Č©╬╗╗“š▀ŽÓī”Č©╬╗Ż®Ż¼╣ż│╠å╬╬╗Ż║Real ą═öĄō■Ż╗ŽÓī”├}ø_Ż║DINTą═öĄō■
C_Speed Ż║▌SĄ─«öŪ░╦┘Č╚ Ż¼Real ą═öĄō■
C_Dir Ż║▌SĄ─«öŪ░ĘĮŽ“Ż©1=Ę┤Ž“Ż¼0=š²Ž“Ż®
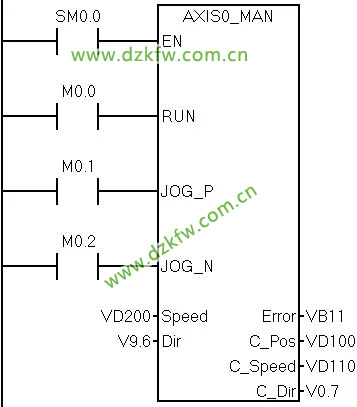
2. ╩ųäė┐žųŲ▌S
AXISx_MAN ūė└²│╠Ż©╩ųäė─Ż╩ĮŻ®īó▀\äė▌Sų├×ķ╩ųäė─Ż╩ĮĪŻ▀@į╩įSļŖÖC░┤▓╗═¼Ą─╦┘Č╚▀\ąąŻ¼╗“čžš²Ž“╗“žōŽ“┬²▀MĪŻ
į┌═¼ę╗ĢrķgāH─▄åóė├ RUNĪóJOG_P ╗“ JOG_N ▌ö╚ļų«ę╗ĪŻ
╣▄─_║¼┴xŻ║
RUNŻ║1=▌S╩ųäė▀\ąąŻ©╦┘Č╚║═ĘĮŽ“Ęųäeė╔ Speed║═ Dir ╣▄─_┐žųŲŻ®0=═Żų╣╩ųäė┐žųŲ
JOG_PŻ║1=š²▐D³cäė┐žųŲ
JOG_NŻ║1=Ę┤▐D³cäė┐žųŲ
SpeedŻ║RUN▀\ąąĢrĄ──┐ś╦╦┘Č╚Ż¼Real ą═öĄō■
DirŻ║RUN▀\ąąĢrĄ─ĘĮŽ“
Error Ż║Õeš`┤·┤aŻ©ūų╣ØŻ®
C_Pos Ż║▌S«öŪ░╬╗ų├Ż©Į^ī”Č©╬╗╗“š▀ŽÓī”Č©╬╗Ż®Ż¼╣ż│╠å╬╬╗Ż║Real ą═öĄō■Ż╗ŽÓī”├}ø_Ż║DINTą═öĄō■
C_Speed Ż║▌S«öŪ░╦┘Č╚ Ż¼Real ą═öĄō■
C_Dir Ż║▌S«öŪ░ĘĮŽ“Ż©1=Ę┤Ž“Ż¼0=š²Ž“Ż®
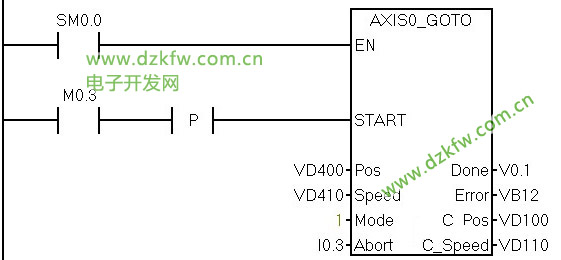
3. Į^ī”╗“š▀ŽÓī”Č©╬╗
AXISx_GOTO ūė│╠ą“├³┴Ņ▀\äė▌S▐DĄĮ╦∙ąĶ╬╗ų├ĪŻ
╣▄─_║¼┴xŻ║
STARTŻ║├┐Įė═©ę╗éĆÆ▀├Ķų▄Ų┌Ż¼Š═ł╠ąąę╗┤╬Č©╬╗
PosŻ║─┐ś╦╬╗ų├Ż©Į^ī”Č©╬╗×ķū°ś╦³cŻ¼ŽÓī”Č©╬╗×ķā╔³cķgŠÓļxŻ®Ż¼╣ż│╠å╬╬╗Ż║Real ą═öĄō■Ż╗ŽÓī”├}ø_Ż║DINTą═öĄō■
SpeedŻ║─┐ś╦╦┘Č╚Ż¼Real ą═öĄō■
MODEŻ║ęŲäė─Ż╩Į 0Ż║Į^ī”╬╗ų├ 1Ż║ŽÓī”╬╗ų├ 2Ż║å╬╦┘▀B└mš²Ž“ą²▐D 3Ż║å╬╦┘▀B└mĘ┤Ž“ą²▐D
AbortŻ║═Żų╣š²į┌ł╠ąąĄ─▀\äė
Done Ż║═Ļ│╔ś╦ųŠ╬╗
Error Ż║Õeš`┤·┤aŻ©ūų╣ØŻ®
C_Pos Ż║▌S«öŪ░╬╗ų├Ż©Į^ī”Č©╬╗╗“š▀ŽÓī”Č©╬╗Ż®Ż¼╣ż│╠å╬╬╗Ż║Real ą═öĄō■Ż╗ŽÓī”├}ø_Ż║DINTą═öĄō■
C_Speed Ż║▌S«öŪ░╦┘Č╚ Ż¼Real ą═öĄō■
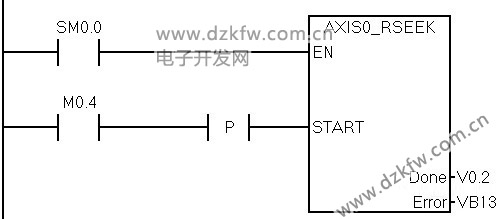
4. ▓ķšęģó┐╝³c
AXISx_RSEEK ūė│╠ą“Ż©╦č╦„ģó┐╝³c╬╗ų├Ż®╩╣ė├ĮMæB/Ū·ŠĆ▒ĒųąĄ─╦č╦„ĘĮĘ©åóäėģó┐╝³c╦č╦„▓┘ū„ĪŻ
▀\äė▌SšęĄĮģó┐╝³cŪę▀\äė═Żų╣║¾Ż¼▀\äė▌Sīó RP_OFFSET ģóöĄųĄ▌d╚ļ«öŪ░╬╗ų├ĪŻ
╣▄─_║¼┴xŻ║
STARTŻ║├┐Įė═©ę╗éĆÆ▀├Ķų▄Ų┌Ż¼Š═ł╠ąąę╗┤╬▓ķšęģó┐╝³cŻ©ģó┐╝³c▓ķšęĘĮ╩Įė╔▌SĮMæB┤_Č©Ż®
Done Ż║═Ļ│╔ś╦ųŠ╬╗
Error Ż║Õeš`┤·┤aŻ©ūų╣ØŻ®
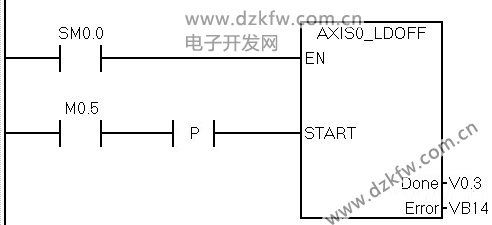
5. ╝ė▌dģó┐╝³cŲ½ęŲ┴┐
AXISx_LDOFF ūė│╠ą“Ż©╝ė▌dģó┐╝³cŲ½ęŲ┴┐Ż®Į©┴óę╗éĆ┼cģó┐╝³c╠Äė┌▓╗═¼╬╗ų├Ą─ą┬Ą─┴Ń╬╗ų├ĪŻ
į┌ł╠ąąįōūė│╠ą“ų«Ū░Ż¼▒žĒÜ╩ūŽ╚┤_Č©ģó┐╝³cĄ─╬╗ų├ĪŻ▀Ć▒žĒÜīóÖCŲ„ęŲų┴Ų╩╝╬╗ų├ĪŻ
«öūė│╠ą“░l╦═ LDOFF ├³┴ŅĢrŻ¼▀\äė▌Sėŗ╦ŃŲ╩╝╬╗ų├Ż©«öŪ░╬╗ų├Ż®┼cģó┐╝³c╬╗ų├ų«ķgĄ─Ų½ęŲ┴┐ĪŻ▀\äė▌S╚╗║¾īó╦Ń│÷Ą─Ų½ęŲ┴┐┤µā”ĄĮ RP_OFFSET ģóöĄ▓óīó«öŪ░╬╗ų├įO×ķ 0ĪŻ▀@īóŲ╩╝╬╗ų├Į©┴ó×ķ┴Ń╬╗ų├ĪŻ
╚ń╣¹ļŖÖC╩¦╚źī”╬╗ų├Ą─ūĘ█ÖŻ©└²╚ńöÓļŖ╗“╩ųäėĖ³ōQļŖÖCĄ─╬╗ų├Ż®Ż¼─·┐╔ęį╩╣ė├ AXISx_RSEEK ūė│╠ą“ūįäėųžą┬Į©┴ó┴Ń╬╗ų├ĪŻ
╣▄─_║¼┴xŻ║
STARTŻ║├┐Įė═©ę╗éĆÆ▀├Ķų▄Ų┌Ż¼Š═ł╠ąąę╗┤╬╝ė▌dģó┐╝³cŲ½ęŲ┴┐
Done Ż║═Ļ│╔ś╦ųŠ╬╗
Error Ż║Õeš`┤·┤aŻ©ūų╣ØŻ®
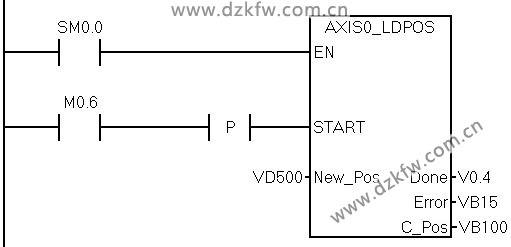
6. ╝ė▌d╬╗ų├
AXISx_LDPOS ūė│╠ą“Ż©╝ė▌d╬╗ų├Ż®īó▀\äė▌SųąĄ─«öŪ░╬╗ų├ųĄĖ³Ė─×ķą┬ųĄĪŻ
▀Ć┐╔ęį╩╣ė├▒Šūė│╠ą“×ķ╚╬║╬Į^ī”ęŲäė├³┴ŅĮ©┴óę╗éĆą┬Ą─┴Ń╬╗ų├ĪŻ
╣▄─_║¼┴xŻ║
STARTŻ║├┐Įė═©ę╗éĆÆ▀├Ķų▄Ų┌Ż¼Š═ł╠ąąę╗┤╬╝ė▌d╬╗ų├
New_PosŻ║ę¬╝ė▌d×ķ«öŪ░╬╗ų├Ą─ųĄ
Done Ż║═Ļ│╔ś╦ųŠ╬╗
Error Ż║Õeš`┤·┤aŻ©ūų╣ØŻ®
C_Pos Ż║▌S«öŪ░╬╗ų├Ż©Į^ī”Č©╬╗╗“š▀ŽÓī”Č©╬╗Ż®Ż¼╣ż│╠å╬╬╗Ż║Real ą═öĄō■Ż╗ŽÓī”├}ø_Ż║DINTą═öĄō■
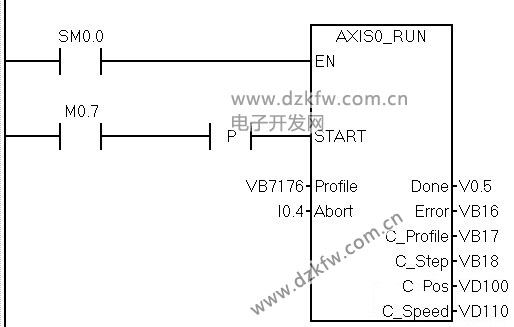
7. ł╠ąąŪ·ŠĆ▀\äė
AXISx_RUN ūė│╠ą“Ż©▀\ąąŪ·ŠĆŻ®├³┴Ņ▀\äė▌S░┤šš┤µā”į┌ĮMæB/Ū·ŠĆ▒ĒĄ─╠žČ©Ū·ŠĆł╠ąą▀\äė▓┘ū„ĪŻ
╣▄─_║¼┴xŻ║
STARTŻ║├┐Įė═©ę╗éĆÆ▀├Ķų▄Ų┌Ż¼Š═ł╠ąąę╗┤╬įOČ©Ą─Ū·ŠĆ▀\äė
ProfileŻ║ąĶꬳ╠ąąĄ─Ū·ŠĆŻ©ė╔ĄžųĘ┤µā”Ż®
AboytŻ║═Żų╣«öŪ░ł╠ąąĄ─Ū·ŠĆ
DoneŻ║═Ļ│╔ś╦ųŠ
ErrorŻ║Õeš`┤·┤aŻ©ūų╣ØŻ®
C_ProfileŻ║š²į┌▀\ąąĄ─Ū·ŠĆ
C_StepŻ║š²į┌▀\ąąŪ·ŠĆā╚«öŪ░ł╠ąąĄ─▓Į
C_Pos Ż║▌S«öŪ░╬╗ų├Ż©Į^ī”Č©╬╗╗“š▀ŽÓī”Č©╬╗Ż®Ż¼╣ż│╠å╬╬╗Ż║Real ą═öĄō■Ż╗ŽÓī”├}ø_Ż║DINTą═öĄō■
C_Speed Ż║▌S«öŪ░╦┘Č╚ Ż¼Real ą═öĄō■
┐┤═Ļ▀@ą®─ŃīWĄĮ┴╦å߯┐
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū