
plc╚ń║╬┐žųŲ▓Į▀MļŖÖCĄ─╦┘Č╚║═ĘĮŽ“?
plcū„×ķę╗ĘN╣żśI┐žųŲėŗ╦ŃÖCŻ¼Š▀ėą─ŻēK╗»ĮYśŗĪó┼õų├ņ`╗ŅĪóĖ▀╦┘Ą─╠Ä└Ē╦┘Č╚ĪóŠ½┤_Ą─öĄō■╠Ä└Ē─▄┴”ĪóPLCī”▓Į▀MļŖÖCę▓Š▀ėą┴╝║├Ą─┐žųŲ─▄┴”Ż¼└¹ė├ŲõĖ▀╦┘├}ø_▌ö│÷╣”─▄╗“▀\äė┐žųŲ╣”─▄Ż¼╝┤┐╔īŹ¼Fī”▓Į▀MļŖÖCĄ─┐žųŲĪŻ
ī”ė┌─Ūą®į┌▀\ąą▀^│╠ųąęŲäėŠÓļx║═╦┘Č╚Š∙┤_Č©Ą─Š▀¾wįOéõŻ¼šJ×ķ▓╔ė├PLC═©▀^▓Į▀MļŖÖC“īäėŲ„üĒ┐žųŲ▓Į▀MļŖÖCĄ─▀\▐Dę▓╩Ūę╗ĘN╝╝ągĘĮ░ĖĪŻ
▓Į▀MļŖÖCĄ─╠ž³cŻ║
Ż©1Ż®▓Į▀MļŖÖCĄ─ĮŪ╬╗ęŲ┼c▌ö╚ļ├}ø_öĄć└Ė±│╔š²▒╚Ż¼ļŖÖC▀\▐Dę╗ų▄║¾ø]ėą└█Ęeš`▓ŅŻ¼Š▀ėą┴╝║├Ą─Ė·ļSąįĪŻ
Ż©2Ż®ė╔▓Į▀MļŖÖC┼c“īäėŲ„ļŖ┬ĘĮM│╔Ą─ķ_ŁhöĄūų┐žųŲŽĄĮyŻ¼╝╚ĘŪ│Ż║åå╬Īó┴«ārŻ¼ėųĘŪ│Ż┐╔┐┐ĪŻ═¼ĢrŻ¼╦³ę▓┐╔ęį┼cĮŪČ╚Ę┤üŁh╣ØĮM│╔Ė▀ąį─▄Ą─ķ]ŁhöĄūų┐žųŲŽĄĮyĪŻ
Ż©3Ż®▓Į▀MļŖÖCĄ─äėæBĒææ¬┐ņŻ¼ęūė┌åó═ŻĪóš²Ę┤▐D╝░ūā╦┘ĪŻ
Ż©4Ż®╦┘Č╚┐╔į┌ŽÓ«öīÆĄ─ĘČć·ā╚ŲĮ╗¼š{╣ØŻ¼Ą═╦┘Ž┬╚į─▄▒ŻūC½@Ą├┤¾▐DŠžĪŻ
Ż©5Ż®▓Į▀MļŖÖCų╗─▄═©▀^├}ø_ļŖį┤╣®ļŖ▓┼─▄▀\ąąŻ¼╦³▓╗─▄ų▒Įė╩╣ė├Į╗┴„ļŖį┤║═ų▒┴„ļŖį┤ĪŻ
▓Į▀MļŖÖC─▄Ēææ¬Č°▓╗╩¦▓ĮĄ─ūŅĖ▀▓Į▀MŅl┬╩ĘQ×ķĪ░åóäėŅl┬╩Ī▒Ż╗┼c┤╦ŅÉ╦ŲŻ¼Ī░═Żų╣Ņl┬╩Ī▒╩ŪųĖŽĄĮy┐žųŲą┼╠¢═╗╚╗ĻPöÓŻ¼▓Į▀MļŖÖC▓╗ø_▀^─┐ś╦╬╗ų├Ą─ūŅĖ▀▓Į▀MŅl┬╩ĪŻČ°ļŖÖCĄ─åóäėŅl┬╩Īó═Żų╣Ņl┬╩║═▌ö│÷▐DŠžČ╝ę¬║═žō▌dĄ─▐DäėæT┴┐ŽÓ▀mæ¬ĪŻėą┴╦▀@ą®öĄō■Ż¼Š═─▄ėąą¦Ąžī”▓Į▀MļŖÖC▀Mąąūā╦┘┐žųŲĪŻ
▓╔ė├PLC┐žųŲ▓Į▀MļŖÖCŻ¼æ¬Ė∙ō■Ž┬╩Įėŗ╦ŃŽĄĮyĄ─├}ø_«ö┴┐Īó├}ø_Ņl┬╩╔ŽŽ▐║═ūŅ┤¾├}ø_öĄ┴┐Ż¼▀MČ°▀xō±PLC╝░ŲõŽÓæ¬Ą─╣”─▄─ŻēKĪŻĖ∙ō■├}ø_Ņl┬╩┐╔ęį┤_Č©PLCĖ▀╦┘├}ø_▌ö│÷ĢrąĶꬥ─Ņl┬╩Ż¼Ė∙ō■├}ø_öĄ┴┐┐╔ęį┤_Č©PLCĄ─╬╗īÆĪŻ
├}ø_«ö┴┐=Ż©▓Į▀MļŖÖC▓ĮŠÓĮŪĪ┴┬▌ŠÓŻ®/Ż©360Ī┴é„äė╦┘▒╚Ż®
├}ø_Ņl┬╩╔ŽŽ▐=Ż©ęŲäė╦┘Č╚Ī┴▓Į▀MļŖÖC╝ÜĘųöĄŻ®/├}ø_«ö┴┐
ūŅ┤¾├}ø_öĄ┴┐=Ż©ęŲäėŠÓļxĪ┴▓Į▀MļŖÖC╝ÜĘųöĄŻ®/├}ø_«ö┴┐
├}ø_«ö┴┐=Ż©▓Į▀MļŖÖC▓ĮŠÓĮŪĪ┴┬▌ŠÓŻ®/Ż©360Ī┴é„äė╦┘▒╚Ż®
├}ø_Ņl┬╩╔ŽŽ▐=Ż©ęŲäė╦┘Č╚Ī┴▓Į▀MļŖÖC╝ÜĘųöĄŻ®/├}ø_«ö┴┐
ūŅ┤¾├}ø_öĄ┴┐=Ż©ęŲäėŠÓļxĪ┴▓Į▀MļŖÖC╝ÜĘųöĄŻ®/├}ø_«ö┴┐
PLCī”▓Į▀MļŖÖCĄ─┐žųŲ╩ūŽ╚ę¬┤_┴óū°ś╦ŽĄŻ¼┐╔ęįįO×ķŽÓī”ū°ś╦ŽĄŻ¼ę▓┐╔ęįįO×ķĮ^ī”ū°ś╦ŽĄĪŻū°ś╦ŽĄĄ─įOų├į┌DM6629ūųųąŻ¼00Ī¬03╬╗ī”æ¬├}ø_▌ö│÷0Ż¼04Ī¬07╬╗ī”æ¬├}ø_▌ö│÷1ĪŻįOų├×ķ0ĢrŻ¼×ķŽÓī”ū°ś╦ŽĄŻ╗įOų├×ķ1ĢrŻ¼×ķĮ^ī”ū°ś╦ŽĄĪŻ
▓╔ė├PLC═©▀^▓Į▀M“īäėŲ„üĒ┐žųŲ▓Į▀MļŖÖCĄ─▀\▐DŻ¼Å─Č°▀_ĄĮ┴╦PLCį┌▓Į▀MļŖäė┐žųŲųąæ¬ė├Ė³╝ėÅVĘ║ĪŻ└²╚ńŻ¼į┌ī”å╬ļp▌S▀\äėĄ─┐žųŲ▀^│╠ųąŻ¼į┌┐žųŲ├µ░Õ╔ŽįOČ©ęŲäėŠÓļxĪó╦┘Č╚║═ĘĮŽ“Ą╚ģóöĄĪŻ
PLCūx╚ļ▀@ą®įOČ©ųĄ║¾Ż¼═©▀^▀\╦Ń«a╔·├}ø_ĪóĘĮŽ“ą┼╠¢Ż¼┐žųŲ▓Į▀MļŖäėÖC“īäėŻ¼▀_ĄĮī”ŠÓļxĪó╦┘Č╚ĪóĘĮŽ“┐žųŲĄ──┐Ą─ĪŻ▓ó═©▀^īŹ£yūC├„ŽĄĮy▀\ąąĮY╣¹Š▀ėą┐╔┐┐ąįĪó┐╔ąąąįĪóėąą¦ąįĪŻ
╚²┴Ōplc┐žųŲ▓Į▀MļŖÖC│╠ą“
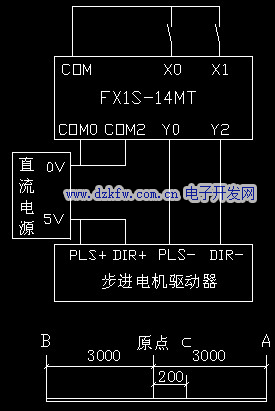
Īż▓╔ė├Į^ī”╬╗ų├┐žųŲųĖ┴Ņ(DRVA)Ż¼┤¾ų┬ĻU╩÷FX1S┐žųŲ▓Į▀MļŖÖCĄ─ĘĮĘ©ĪŻė╔ė┌╦«ŲĮėąŽ▐Ż¼▒ŠīŹ└²▓╔ė├ĘŪīŻśI╩÷šZšō╩÷Ż¼šł╬ę²ė├ĪŻ
ĪżFXŽĄ┴ąPLCå╬į¬─▄═¼Ģr▌ö│÷ā╔ĮM100KHZ├}ø_Ż¼╩ŪĄ═│╔▒Š┐žųŲ╦┼Ę■┼c▓Į▀MļŖÖCĄ─▌^║├▀xō±ŻĪ
ĪżPLS+Ż¼PLS-×ķ▓Į▀M“īäėŲ„Ą─├}ø_ą┼╠¢Č╦ūėŻ¼DIR+Ż¼DIR-×ķ▓Į▀M“īäėŲ„Ą─ĘĮŽ“ą┼╠¢Č╦ūėĪŻ
Īż╦∙ų^Į^ī”╬╗ų├┐žųŲ(DRVA),Š═╩ŪųĖČ©ę¬ū▀ĄĮŠÓļxįŁ³cĄ─╬╗ų├Ż¼įŁ³c╬╗ų├öĄō■┤µĘ┼ė┌32╬╗╝─┤µŲ„D8140└’ĪŻ«öÖCąĄ╬╗ė┌╬ęéāįOČ©Ą─įŁ³c╬╗ų├Ģrė├│╠ą“░čD8140Ą─ųĄŪÕ┴ŃŻ¼ę▓Š═┤_Č©┴╦įŁ³cĄ─╬╗ų├ĪŻ
ĪżīŹ└²äėū„ĘĮ╩ĮŻ║X0ķ]║Žäėū„ĄĮA³c═Żų╣Ż¼X1ķ]║Žäėū„ĄĮB³c═Żų╣Ż¼ĮėŠĆłD┼cäėū„╬╗ų├╩Š└²╚ńū¾łD(ŠÓļxė├├}ø_öĄ▒Ē╩Š)ĪŻ
Īż│╠ą“╚ńŽ┬łDŻ║(┤╦│╠ą“ų╗×ķšf├„ė├Ż¼īŹė├ąĶĖ─╔ŲĪŻ)
Īżšf├„Ż║
Īżį┌įŁ³cĢrīóD8140Ą─ųĄŪÕ┴Ń(▒Š│╠ą“ųąø]ėąū÷┤╦╣”─▄)
Īż32╬╗╝─┤µŲ„D8140╩Ū┤µĘ┼Y0Ą─▌ö│÷├}ø_öĄŻ¼š²▐DĢrį÷╝ėŻ¼Ę┤▐DĢr£p╔┘ĪŻ«öš²▐Däėū„ĄĮA³cĢrŻ¼D8140Ą─ųĄ╩Ū3000ĪŻ┤╦Ģrķ]║ŽX1Ż¼ÖCąĄĘ┤▐Däėū„ĄĮB³cŻ¼ę▓Š═╩Ū-3000Ą─╬╗ų├ĪŻD8140Ą─ųĄŠ═╩Ū-3000ĪŻ
Īż«öÖCąĄÅ─A³cŽ“B³cäėū„▀^│╠ųąŻ¼X1öÓķ_(╚ńį┌C³cöÓķ_)ätD8140Ą─ųĄŠ═╩Ū200Ż¼┤╦Ģrį┘ķ]║ŽX0Ż¼ÖCąĄš²▐Däėū„ĄĮA³c═Żų╣ĪŻ
Īż«öÖCąĄ═Żį┌A³cĢrŻ¼į┘ķ]║ŽX0Ż¼ę“×ķÖCąĄęčĮøį┌ŠÓļxįŁ³c3000Ą─╬╗ų├╔ŽŻ¼╣╩Č°ÖCąĄø]ėąäėū„ŻĪ
Īż░č│╠ą“ųąĄ─Į^ī”╬╗ų├ųĖ┴Ņ(DRVA)ōQ│╔ŽÓī”╬╗ų├ųĖ┴Ņ(DRVI)Ż║
Īż«öÖCąĄį┌B³cĢr(╝┘įO┤╦ĢrD8140Ą─ųĄ╩Ū-3000)ķ]║ŽX0Ż¼ätÖCąĄš²▐D3000éĆ├}ø_═Żų╣Ż¼ę▓Š═╩Ū═Żį┌┴╦įŁ³cĪŻD8140Ą─ųĄ×ķ0
Īż«öÖCąĄį┌B³cĢr(╝┘įO┤╦ĢrD8140Ą─ųĄ╩Ū-3000)ķ]║ŽX1Ż¼ätÖCąĄĘ┤▐D3000éĆ├}ø_═Żų╣Ż¼ę▓Š═╩Ū═Żį┌┴╦ū¾▀ģŠÓļxB³c3000Ą─╬╗ų├(łDųą╬┤«ŗ│÷)Ż¼D8140Ą─ųĄ×ķ-6000ĪŻ
Īżę╗░Ńā╔ŽÓ▓Į▀MļŖÖC“īäėŲ„Č╦ūė╩ŠęŌłDŻ║
ĪżFREE+Ż¼FREE-Ż║├ōÖCą┼╠¢Ż¼▓Į▀MļŖÖCĄ─ø]ėą├}ø_ą┼╠¢▌ö╚ļĢrŠ▀ėąūįµi╣”─▄Ż¼ę▓Š═╩ŪµiūĪ▐Dūė▓╗äėĪŻČ°«öėą├ōÖCą┼╠¢ĢrĮŌ│²ūįµi╣”─▄Ż¼▐Dūė╠Äė┌ūįė╔ĀŅæB▓óŪę▓╗Ēææ¬▓Į▀M├}ø_ĪŻ
ĪżV+Ż¼GNDŻ║×ķ“īäėŲ„ų▒┴„ļŖį┤Č╦ūėŻ¼ę▓ėąĮ╗┴„╣®ļŖŅÉą═ĪŻ
ĪżA+Ż¼A-Ż¼B+Ż¼B-ĘųäeĮė▓Į▀MļŖÖCĄ─ā╔ŽÓŠĆ╚”ĪŻ
╠▌ą╬łD│╠ą“╚ńŽ┬Ż║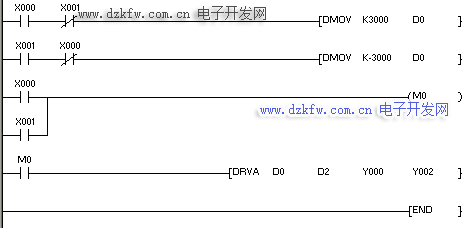
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū