
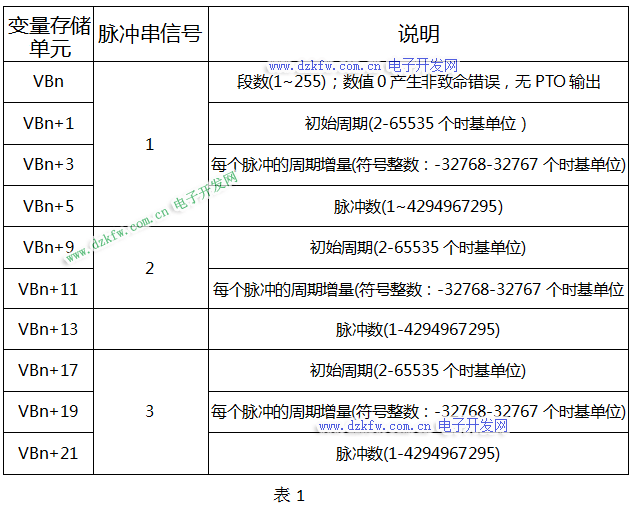
PTO╣”─▄░┤ššĮoČ©Ą─├}ø_éĆöĄ║═ų▄Ų┌▌ö│÷ę╗┤«ĘĮ▓©├}ø_Ż¼š╝┐š▒╚×ķ50ŻźĪŻPTO┐╔ęį«a╔·å╬Č╬├}ø_╗“═©▀^╩╣ė├├}ø_░³Įj«a╔·ČÓČ╬├}ø_ĪŻ▒žĒÜ×ķŲõįOČ©├}ø_éĆöĄ║═ų▄Ų┌Ż©ęį╬ó├ļ╗“║┴├ļ×ķå╬╬╗Ż®Ż║├}ø_éĆöĄŻ║1ŻŁ4294967295Ż¼×ķ32╬╗¤oĘ¹╠¢öĄŻ╗ų▄Ų┌Ż║10~65535us╗“2-65535msŻ¼×ķ16╬╗¤oĘ¹╠¢öĄĪŻ
į┌įOų├├}ø_éĆöĄĢrŻ¼╚¶īó├}ø_éĆöĄįO×ķ0Ż¼ŽĄĮyĢ■─¼šJ×ķéĆöĄ×ķ1Ż║į┌įOų├├}ø_ų▄Ų┌ĢrŻ¼Ę¹╠¢öĄ╚ń╣¹ų▄Ų┌ąĪė┌ā╔éĆĢrķgå╬╬╗Ż¼ŽĄĮyĢ■─¼šJų▄Ų┌×ķā╔éĆĢrķgå╬╬╗Ż¼└²╚ńĢrķgå╬╬╗×ķmsŻ¼ų▄Ų┌įO×ķ1.3msŻ¼ŽĄĮyĢ■─¼šJų▄Ų┌×ķ2msŻ¼┴Ē═ŌŻ¼╚ń╣¹īóų▄Ų┌ųĄįO×ķŲµöĄųĄ(╚ń75ms)Ż¼«a╔·Ą─├}ø_▓©ą╬Ģ■╩¦šµĪŻ
PTO├}ø_šnĘų×ķå╬Č╬├}ø_┤«║═ČÓČ╬├}ø_┤«Ż¼ČÓČ╬├}ø_┤«ė╔ČÓéĆå╬Č╬├}ø_┤«ĮM│╔ĪŻ
1Īóå╬Č╬├}ø_┤«Ą─«a╔·
ę¬ūīQ0.0╗“Q0.1Č╦ūė▌ö│÷å╬Č╬├}ø_┤«Ż¼ĒÜŽ╚ī”ŽÓĻPĄ─┐žųŲūų╣Ø║═ģóöĄ▀MąąįOų├Ż¼į┘ł╠ąąĖ▀╦┘├}ø_▌ö│÷PLSųĖ┴ŅĪŻ
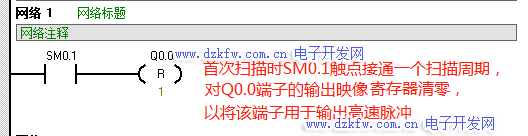
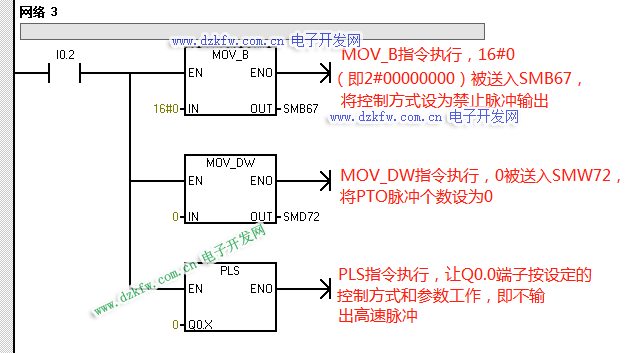
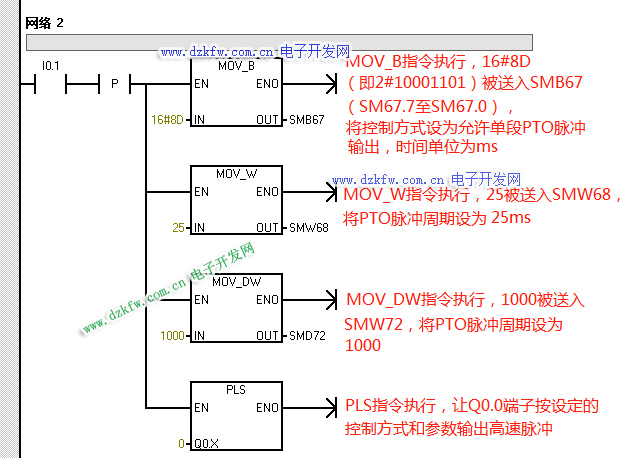
Ž┬├µ╩Ūę╗Č╬ė├üĒ«a╔·å╬Č╬├}ø_┤«Ą─│╠ą“ĪŻį┌PLC╩ū┤╬Æ▀├ĶĢrŻ¼SM0.1ė|³cķ]║Žę╗éĆÆ▀├Ķų▄Ų┌Ż¼Å═╬╗ųĖ┴ŅīóQ0.0▌ö│÷ė│Ž±╝─┤µŲ„(╝┤Q0.0ŠĆ╚”)ų├0Ż¼ęį▒ŃīóQ0.0Č╦ūėė├ė┌Ė▀╦┘├}ø_▌ö│÷Ż║«öI0.1▌S³c║ŽĢrŻ¼╔Žķ_čžPė|³cĮė═©ę╗éĆÆ▀├Ķų▄Ų┌Ż¼MOV_BĪóMOV_W║═MOV_ DWę└┤╬ł╠ąąŻ¼ī”Ė▀╦┘├}ø_░l╔·Ų„Ą─┐žųŲūų╣Ø║═ģóöĄ▀MąąįOų├Ż¼╚╗║¾ł╠ąąĖ▀╦┘├}ø_▌ö│÷PLSųĖ┴ŅŻ¼ūīĖ▀╦┘├}ø_░l╔·Ų„░┤įOų├«a╔·å╬Č╬PTO├}ø_┤«▓óÅ─Q0.0Č╦ūė▌ö│÷ĪŻį┌PTO├}ø_┤«▌ö│÷Ų┌ķgŻ¼╚ń╣¹I0.2ė|³cķ]║ŽŻ¼MOV_BĪó MOV_ DWę└┤╬ł╠ąąŻ¼īó┐žųŲūų╣ØįO×ķĮ¹ų╣├}ø_▌ö│÷Īó├}ø_éĆöĄįO×ķ0Ż¼╚╗║¾ł╠ąąPLSųĖ┴ŅŻ¼Ė▀╦┘├}ø_░l╔·Ų„±R╔Ž░┤ą┬Ą─įOų├╣żū„Ż¼╝┤═Żų╣Å─Q0.0Č╦ūė▌ö│÷├}ø_ĪŻå╬Č╬PTO├}ø_┤«▌ö│÷═Ļ│╔║¾Ż¼ĀŅæB╬╗SM66.7Ģ■ų├1Ż¼▒Ē╩ŠPTO├}ø_▌ö│÷ĮY╩°ĪŻ
2Īóå╬Č╬├}ø_┤«Ą─«a╔·
ČÓČ╬├}ø_┤«ėąā╔ĘNŅÉą═Ż║å╬Č╬╣▄Ą└├}ø_┤«║═ČÓČ╬╣▄Ą└├}ø_┤«
Ż©1Ż®å╬Č╬╣▄Ą└├}ø_┤«
ė╔ė┌┐žųŲå╬į¬ģóöĄų╗─▄ī”å╬Č╬├}ø_┤««a╔·ū„ė├Ż¼ę“┤╦į┌▌ö│÷å╬Č╬╣▄Ą└├}ø_┤«ĢrŻ¼ę¬Ū¾ł╠ąąPLSųĖ┴Ņ«a╔·╩ūČ╬├}ø_┤«║¾Ż¼┴ó╝┤ĮėĄ┌Č■Č╬├}ø_┤«ę¬Ū¾╦óą┬┐žųŲģóöĄå╬į¬Ż¼▓óį┘┤╬ł╠ąąPLS┤«ųąĄ─├┐éĆ├}ø_ģóöĄę¬ŽÓ═¼ųĖ┴ŅŻ¼▀@śė╩ūČ╬├}ø_┤«▌ö│÷═Ļ│╔║¾Ż¼Ģ■Įėų°░┤ą┬Ą─┐žųŲģóöĄ▌ö│÷Ą┌Č■Č╬├}ø_┤«ĪŻå╬Č╬╣▄Ą└├}ø_┤«Ą─├┐éĆ├}ø_┤«┐╔▓╔ė├▓╗═¼ģóöĄŻ¼▀@śėęū│÷¼F├}ø_┤«ų«ķg▀BĮė▓╗ŲĮĘĆŻ¼į┌▌ö│÷ČÓéĆģóöĄ▓╗═¼Ą─├}ø_┤«ĢrŻ¼ŠÄ│╠ę▓║▄Å═ļsĪŻ
Ż©2Ż®ČÓČ╬╣▄Ą└├}ø_┤«
ČÓČ╬╣▄Ą└├}ø_┤«ę▓ė╔ČÓéĆå╬Č╬├}ø_┤«ĮM│╔Ż¼├┐éĆå╬Č╬├}ø_┤«Ą─ģóöĄ┐╔ęį▓╗═¼Ż¼å╬Č╬├}ø_┤«ųąĄ─├┐éĆ├}ø_ģóöĄę▓┐╔ęį▓╗═¼ĪŻ
ó┘ ģóöĄįOų├░³Įj▒Ē
ė╔ė┌ČÓČ╬╣▄Ą└├}ø_┤«Ą─Ė„éĆ├}ø_┤«į╩įSėą▌^Å═ļsĄ─ūā╗»Ż¼¤oĘ©ė├«a╔·å╬Č╬╣▄Ą└├}ø_┤«Ą─ĘĮĘ©üĒ▌ö│÷ČÓČ╬╣▄Ą└├}ø_┤«Ż¼S7-200PLC▓╔ė├į┌ūā┴┐┤µā”ģ^Į©┴óę╗éĆ░³Įj▒ĒĄ─ĘĮĘ©Ż¼ė╔įō▒ĒüĒįOų├ČÓČ╬╣▄Ą└├}ø_┤«ųąĄ─Ė„éĆ├}ø_┤«Ą─ģóöĄĪŻČÓČ╬╣▄Ą└├}ø_┤«Ą─ģóöĄįOų├░³Įj▒ĒęŖ▒Ē1Ż¼Å─░³Įj▒Ēųą┐╔ęį┐┤│÷Ż¼├┐Č╬├}ø_┤«Ą─ģóöĄš╝ė├8ūų╣ØŻ¼Ųõųą2ūų╣Ø×ķ16╬╗│§╩╝ų▄Ų┌ųĄ,2ūų╣Ø×ķ16╬╗ų▄Ų┌į÷┴┐ųĄ,4ūų╣Ø×ķ32╬╗├}ø_öĄųĄŻ¼┐╔ęį═©▀^ŠÄ│╠Ą─ĘĮ╩Į╩╣├}ø_Ą─ų▄Ų┌ūįäėį÷£pŻ¼į┌ų▄Ų┌į÷┴┐╠Ä▌ö╚ļę╗éĆš²ųĄĢ■į÷╝ėų▄Ų┌Ż¼▌ö╚ļę╗éĆžōųĄĢ■£p╔┘ų▄Ų┌Ż¼▌ö╚ļ0īó▓╗Ė─ūāų▄Ų┌ĪŻ
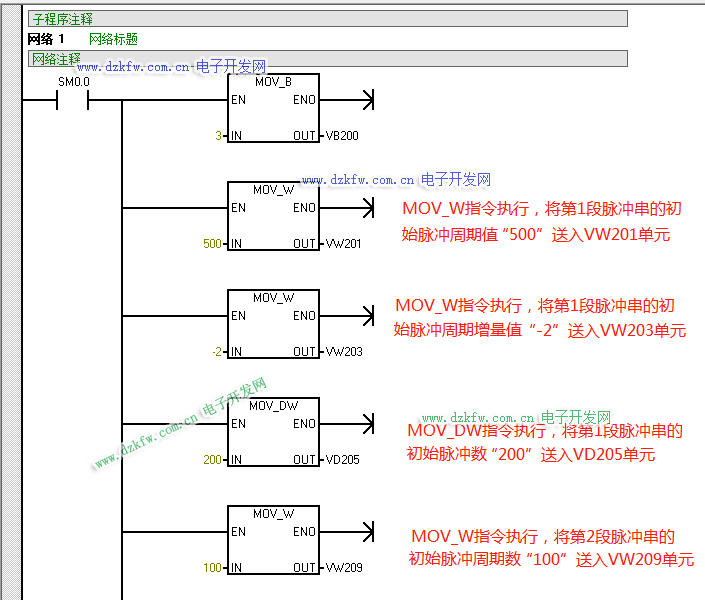
į┌ČÓČ╬╣▄Ą└─Ż╩ĮŽ┬Ż¼ŽĄĮy╚į╩╣ė├╠ž╩Ō┤µā”Ų„ģ^Ą─ŽÓæ¬┐žųŲūų╣Ø║═ĀŅæB╬╗Ż¼├┐éĆ├}ø_┤«Ą─ģóöĄätÅ─░³Įj▒ĒĄ─ūā┴┐┤µā”Ų„ģ^ūx│÷Ż¼į┌ČÓČ╬╣▄Ą└ŠÄ│╠ĢrŻ¼▒žĒÜīó░³Įj▒ĒĄ─ūā┴┐┤µā”Ų„Ų╩╝ĄžųĘ(╝┤░³Įj▒ĒųąĄ─nųĄ)┤µ╚ļSMW168╗“SMW178ųąŻ¼į┌░³Įj▒ĒųąĄ─╦∙ėąų▄Ų┌ųĄ▒žĒÜ╩╣ė├═¼ę╗éĆĢrķgå╬╬╗Ż¼Č°Ūęį┌▀\ąąĢr▓╗─▄Ė─ūā░³Įj▒ĒųąĄ─ā╚╚▌Ż¼ł╠ąąPLSųĖ┴ŅüĒåóäėČÓČ╬╣▄Ą└▓┘ū„ĪŻ
ó┌ ČÓČ╬╣▄Ą└├}ø_┤«Ą─æ¬ė├┼e└²
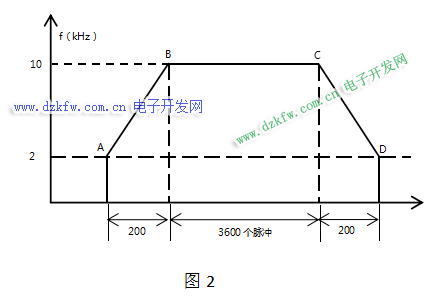
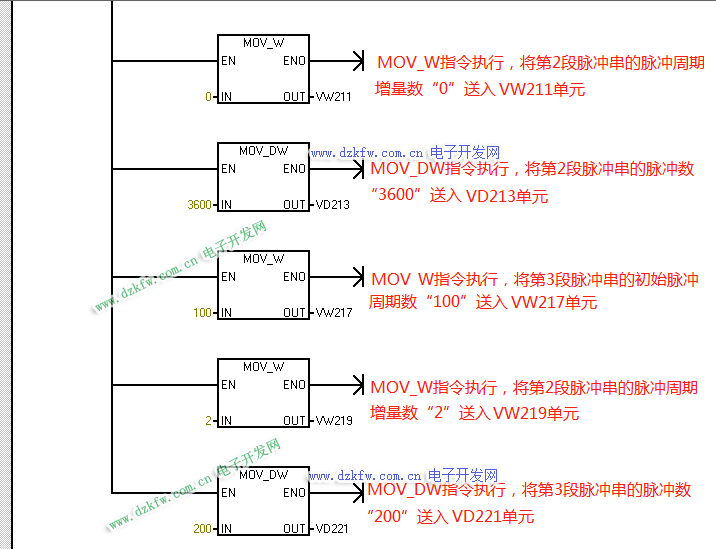
ČÓČ╬╣▄Ą└├}ø_┤«│Żė├ė┌▓Į▀MļŖäėÖCĄ─┐žųŲĪŻłD2╩Ūę╗éĆ▓Į▀MļŖäėÖCĄ─┐žųŲ░³ĮjŠĆŻ¼░³ĮjŠĆĘų3Č╬Ż║Ą┌1Č╬(ABČ╬)×ķ╝ė╦┘▀\ąąŻ¼ļŖäėÖCĄ─Ų╩╝Ņl┬╩×ķ2kHz(ų▄Ų┌×ķ500s)Ż¼ĮKų╣Ņl┬╩×ķ10kHz(ų▄Ų┌×ķ100us)Ż¼ę¬Ū¾▀\ąą├}ø_öĄ─┐×ķ200éĆŻ║Ą┌2Č╬(BCČ╬)×ķ║Ń╦┘▀\ąąŻ¼ļŖäėÖCĄ─Ų╩╝║═ĮKų╣Ņl┬╩Š∙×ķ10kHz(ų▄Ų┌×ķ100s)Ż¼ę¬Ū¾▀\ąą├}ø_öĄ─┐×ķ3600éĆŻ╗Ą┌3Č╬(CDČ╬)×ķ£p╦┘▀\ąąŻ¼ļŖäėÖCĄ─Ų╩╝Ņl┬╩×ķ10kHz(ų▄Ų┌×ķ100us)Ż¼ĮKų╣Ņl┬╩×ķ2kHz(500us)Ż¼ę¬Ū¾▀\ąą├}ø_öĄ─┐×ķ200éĆĪŻ
Ė∙ō■PLC│╠ą“▓Į▀MļŖäėÖCĄ─┐žųŲ░³ĮjŠĆ┴ą│÷Ą─░³Įj▒Ē
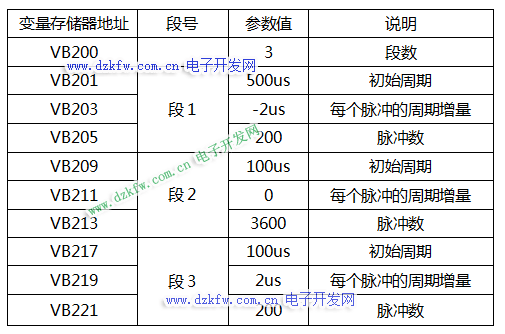
Ė∙ō■░³Įj▒Ē┐╔ŠÄīæ│÷▓Į▀MļŖäėÖCĄ─┐žųŲ│╠ą“Ż¼įō│╠ą“ė╔ų„│╠ą“ĪóSBR_0ūė│╠ą“║═NT_0ųąöÓ│╠ą“ĮM│╔ĪŻ
Ī°ų„│╠ą“
Ī°SBR_0ūė│╠ą“
Ī°INT_0ųąöÓ│╠ą“
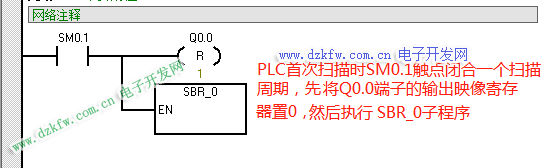
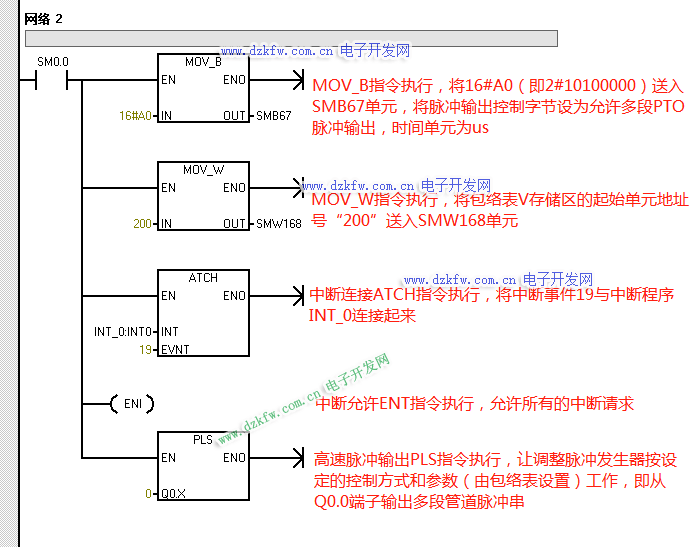
į┌ų„│╠ą“ųąŻ¼PLC╩ū┤╬Æ▀├ĶĢrSM0ĪŻė|³cķ]║Žę╗éĆÆ▀├Ķų▄Ų┌Ż¼Ž╚īóQ0.0Č╦ūė▌ö│÷ė│Ž±╝─┤µŲ„ų├0Ż¼ęį▒ŃīóįōČ╦ūėė├ė┌Ė▀╦┘├}ø_▌ö│÷Ż¼╚╗║¾ł╠ąąūė│╠ą“š{ė├ųĖ┴Ņ▐D╚ļSBR0ūė│╠ą“ĪŻį┌SBR0ūė│╠ą“ųąŻ¼ŠWĮj1ė├ė┌įOų├ČÓČ╬╣▄Ą└├}ø_┤«Ą─ģóöĄ░³Įj▒Ē(Č╬öĄĪóĄ┌1Č╬ģóöĄĪóĄ┌2Č╬ģóöĄ║═Ą┌3Č╬ģóöĄ)Ż¼ŠWĮj2Ž╚įOų├├}ø_▌ö│÷Ą─┐žųŲūų╣ØŻ¼▓óīó░³Įj▒ĒŲ╩╝å╬į¬ĄžųĘ╠¢╦═╚ļSMW168å╬į¬Ż¼╚╗║¾ė├ųąöÓ▀BĮėųĖ┴ŅīóNT0ųąöÓ│╠ą“┼cųąöÓ╩┬╝■19(PTO0├}ø_┤«▌ö│÷═Ļ│╔«a╔·ųąöÓ)▀BĮėŲüĒŻ¼į┘ė├ENųĖ┴Ņį╩įS╦∙ėąĄ─ųąöÓŻ¼ūŅ║¾ł╠ąąPLSųĖ┴ŅŻ¼ūīĖ▀╦┘├}ø_░l╔·Ų„░┤įOČ©Ą─┐žųŲĘĮ╩Į║═ģóöĄ(ė╔░³Įj▒ĒįOų├)╣żū„Ż¼╝┤Å─Q0.0Č╦ūė▌ö│÷ČÓČ╬╣▄Ą└├}ø_┤«Ż¼╚ź“īäė▓Į▀MļŖäėÖC░┤╝ė╦┘Īó║Ń╦┘║═£p╦┘Ēśą“▀\ąąĪŻ«öQ00Č╦ūėĄ─ČÓ╣▄Ą└PTO├}ø_▌ö│÷═Ļ│╔║¾Ż¼±R╔ŽĢ■Ž“ŽĄĮy░l│÷ųąöÓšłŪ¾Ż¼ŽĄĮyätł╠ąąDNT0ųąöÓ│╠ą“Ż¼Q10ŠĆ╚”Ą├ļŖĪŻ
▐D▌dšłūó├„üĒį┤
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū