
S7-200SMART╩Ū╬„ķTūė╣½╦ŠĄ─ę╗┐ŅąĪą═PLCĪŻ▒Š╬─ĮķĮBę╗ĘNPLCų▒Įė┐žųŲ▓Į▀M(j©¼n)ļŖÖC(j©®)Ą─ĘĮĘ©Ż¼Ģ■(hu©¼)ĖĮĦ╠▌ą╬łD│╠ą“ĪŻ
¼F(xi©żn)ėą─▄╦čĄĮĄ─║▄ČÓĮ╠│╠Č╝╩Ū╩╣ė├▓Į▀M(j©¼n)ļŖÖC(j©®)“ī(q©▒)äė(d©░ng)Ų„Ż¼╚╗║¾ė├ķ_░l(f©Ī)╣żŠ▀ųą╩╣ė├Ž“?q©▒)¦╔·│╔PWMūė│╠ą“š{(di©żo)ė├Ż¼▀@ĘNĘĮĘ©ę“?y©żn)ķ║å▒Ń┐╔┐┐Ż¼ę▓╩Ū─┐Ū░ī?sh©¬)ļH╣ż│╠ųą╩╣ė├ūŅČÓĄ─ĪŻ▀Ć┐╔ęį╩╣ė├PTOŻ¼ę▓╩Ū╩╣ė├ķ_░l(f©Ī)╣żŠ▀ųąĄ─Ž“?q©▒)¦│§╩╝╗»ĪŻęį╔Žā╔ĘNĘĮĘ©Č╝┐╔ęį╦čĄĮ║▄ČÓĮ╠│╠ĪŻų╗ė├Č©Ģr(sh©¬)Ų„ų▒Įė┐žųŲĄ─║▄╔┘ėąĮ╠│╠ĪŻ▒Š╬─ĮķĮBĄ─ų▒Įė┐žųŲŠ═╩Ū▓╗▀mė├ļŖÖC(j©®)“ī(q©▒)äė(d©░ng)Ų„Ż¼āHę└┐┐PLCĄ─ėŗ(j©¼)Ģr(sh©¬)Ų„üĒ╔·│╔┐žųŲ├}ø_ĪŻ
▓Į▀M(j©¼n)ļŖÖC(j©®)║å╩÷
╝╚╚╗╩Ū┐žųŲ▓Į▀M(j©¼n)ļŖÖC(j©®)Ż¼╬ęéāŠ═ꬎ╚┴╦ĮŌ▓Į▀M(j©¼n)ļŖÖC(j©®)ĪŻ▓Į▀M(j©¼n)ļŖÖC(j©®)Ęų×ķ╚²┤¾ŅÉŻ║ė└┤┼╩ĮĪóĘ┤æ¬(y©®ng)╩ĮĪó╗ņ║Ž╩ĮĪŻŠ▀¾wģ^(q©▒)äeūįąą▓ķķå╝┤┐╔Ż¼┤╦╠Ä▓╗┘ś╩÷(äeå¢Ż¼å¢Š═╩ŪæąĄ─┤a)ĪŻ
╦─ŽÓ▓Į▀M(j©¼n)ļŖÖC(j©®)═©▀^Įo╦─éĆ(g©©)Č©ūėŠĆ╚”═©ļŖĒśą“║═Ģr(sh©¬)ķgĄ─▓╗═¼Ż¼Å─Č°ą╬│╔ÅŖ(qi©óng)Č╚║═ĘĮŽ“▓╗═¼Ą─ą²▐D(zhu©Żn)┤┼ł÷Ż¼╬³ę²▐D(zhu©Żn)ūėęį▓╗═¼ĘĮŽ“║═╦┘Č╚ą²▐D(zhu©Żn)ĪŻ░┤šš═©ļŖĒśą“Ą─▓╗═¼Ż¼┐╔Ęų×ķå╬╦─┼─Īóļp╦─┼─Īó░╦┼─╚²ĘN╣żū„ĘĮ╩ĮĪŻå╬╦─┼─┼cļp╦─┼─Ą─▓ĮŠÓĮŪŽÓĄ╚Ż¼Ą½å╬╦─┼─Ą─▐D(zhu©Żn)äė(d©░ng)┴”ŠžąĪĪŻ░╦┼─╣żū„ĘĮ╩ĮĄ─▓ĮŠÓĮŪ╩Ūå╬╦─┼─┼cļp╦─┼─Ą─ę╗░ļŻ¼ę“┤╦Ż¼░╦┼─╣żū„ĘĮ╩Į╝╚┐╔ęį▒Ż│ų▌^Ė▀Ą─▐D(zhu©Żn)äė(d©░ng)┴”Šžėų┐╔ęį╠ßĖ▀┐žųŲŠ½Č╚ĪŻ▒Š╬─ĮķĮBĄ─Š═╩Ū░╦┼─“ī(q©▒)äė(d©░ng)Ą─ĘĮĘ©ĪŻ
┐žųŲįŁ└ĒŻ║
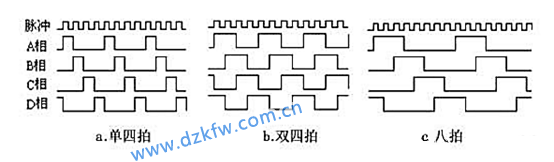
╦─ŽÓ░╦┼─ļŖÖC(j©®)Ą─╦─ŽÓŠĆ╚”Ęųäeė├ AĪóBĪóCĪóD ▒Ē╩ŠĪŻ
«ö(d©Īng)ļŖÖC(j©®)š²▐D(zhu©Żn)Ģr(sh©¬)Ż¼Ųõ╣żū„ĘĮ╩Į╚ńŽ┬Ż║AĪ·ABĪ·BĪ·BCĪ·CĪ·CDĪ·DĪ·DAĪ·AĪŻ
«ö(d©Īng)ļŖÖC(j©®)Ę┤▐D(zhu©Żn)Ģr(sh©¬)Ż¼Ųõ╣żū„ĘĮ╩Į╚ńŽ┬Ż║AĪ·ADĪ·DĪ·DCĪ·CĪ·CBĪ·BĪ·BAĪ·AĪŻ
įO(sh©©)ėŗ(j©¼)ę¬Ū¾Ż║
įO(sh©©)ėŗ(j©¼)│╠ą“?q©▒)Ź¼F(xi©żn)ī”▓Į▀M(j©¼n)ļŖÖC(j©®)åóäė(d©░ng)Īó═Żų╣Īóš²▐D(zhu©Żn)ĪóĘ┤▐D(zhu©Żn)Ą─┐žųŲ╝░īŹ(sh©¬)¼F(xi©żn) 3 Önš{(di©żo)╦┘╝┤┐ņ╦┘Īóųą╦┘Īó┬²╦┘ĪŻ┐žųŲ─ŻēKųąĄ─▓Į▀M(j©¼n)ļŖÖC(j©®)╣żū„ĘĮ╩Į×ķ╦─ŽÓ░╦┼─ļŖÖC(j©®)Ą─╦─ŽÓŠĆ╚”Ęųäeė├ AĪóBĪóCĪóD ▒Ē╩ŠĪŻąĶę¬╩╣ė├öĄ(sh©┤)┤a╣▄’@╩ŠļŖÖC(j©®)Ön╬╗ĪŻ
PLC╠▌ą╬łD│╠ą“?q©▒)Ź¼F(xi©żn)
┤╦│╠ą“I/O┼õų├Ęų┼õŪķør╚ńŽ┬▒ĒŻ║
| I/O┐┌ | ▀BĮėČ╦┐┌ | I/O┐┌ | ▀BĮėČ╦┐┌ |
| I0.0 | åóäė(d©░ng) | Q0.3 | ▓Į▀M(j©¼n)ļŖÖC(j©®)DŽÓ |
| I0.1 | ═Żų╣ | Q1.0 | öĄ(sh©┤)┤a╣▄AČ╬ |
| I0.2 | š²▐D(zhu©Żn) | Q1.1 | öĄ(sh©┤)┤a╣▄BČ╬ |
| I0.3 | Ę┤▐D(zhu©Żn) | Q1.2 | öĄ(sh©┤)┤a╣▄CČ╬ |
| I0.4 | ┐ņ╦┘ | Q1.3 | öĄ(sh©┤)┤a╣▄DČ╬ |
| I0.5 | ┬²╦┘ | Q1.4 | öĄ(sh©┤)┤a╣▄EČ╬ |
| Q0.0 | ▓Į▀M(j©¼n)ļŖÖC(j©®)AŽÓ | Q1.5 | öĄ(sh©┤)┤a╣▄FČ╬ |
| Q0.1 | ▓Į▀M(j©¼n)ļŖÖC(j©®)BŽÓ | Q1.6 | öĄ(sh©┤)┤a╣▄GČ╬ |
| Q0.2 | ▓Į▀M(j©¼n)ļŖÖC(j©®)CŽÓ |
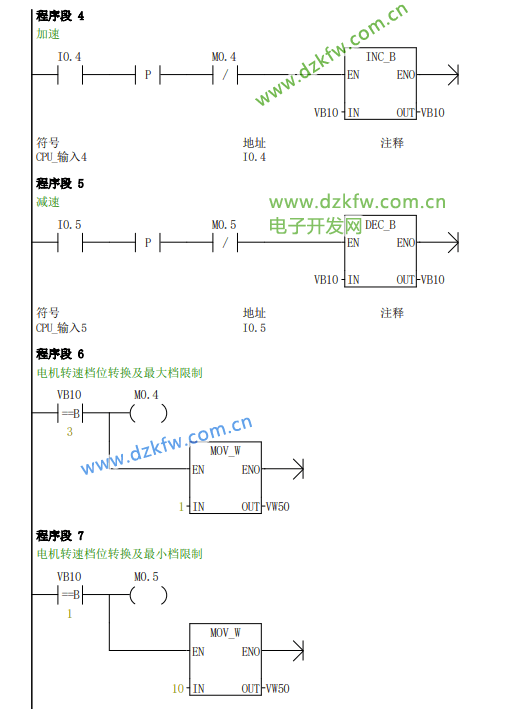
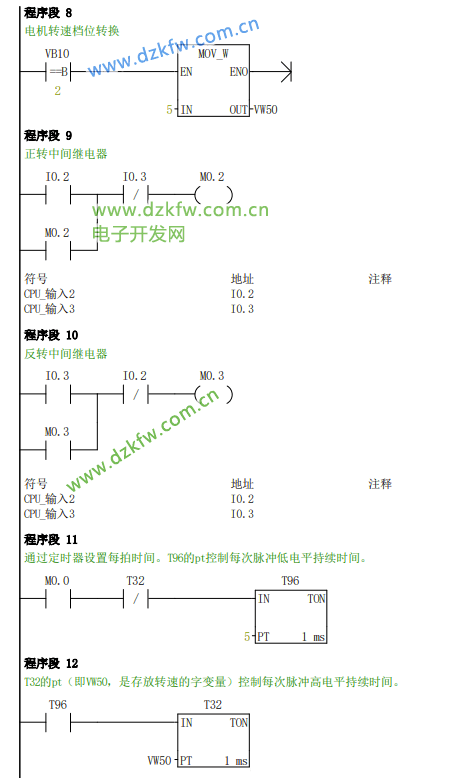
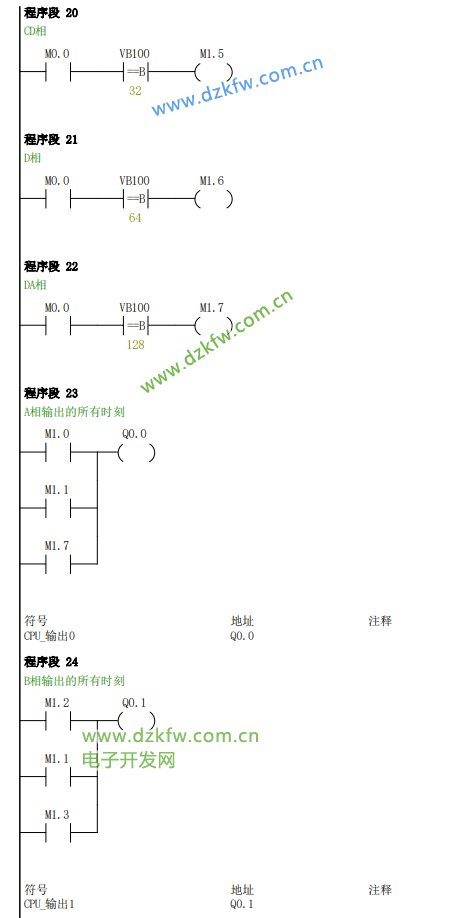
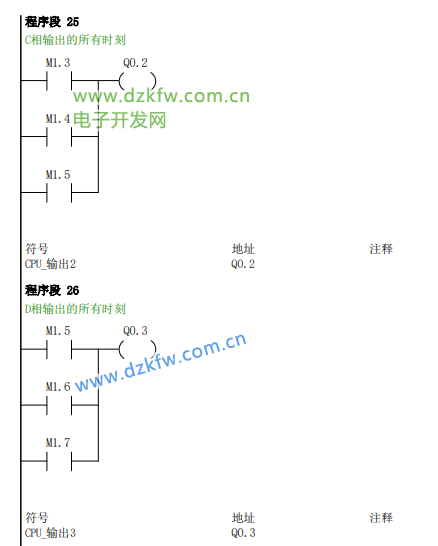
Ž┬├µ╩Ū╩╣ė├s7-200 smart╣┘ĘĮ╝»│╔ķ_░l(f©Ī)Łh(hu©ón)Š│Step 7MicroWIN SMART▄ø╝■ŠÄ│╠īŹ(sh©¬)¼F(xi©żn)ī”╦─ŽÓ░╦┼─▓Į▀M(j©¼n)ļŖÖC(j©®)┐žųŲĄ─│╠ą“ĪŻ╣żū„įŁ└Ē╝░ī”┤╦│╠ą“Ą─ĮŌßīŠ∙ęįūóßīĄ─ą╬╩Įį┌Ž┬łDųąĮo│÷ĪŻ┤╦╠ÄāH┬Ģ├„│╠ą“ųą│÷¼F(xi©żn)Ą─ūā┴┐Ą─║¼┴xŻ║VB10(┤µĘ┼ļŖÖC(j©®)▐D(zhu©Żn)╦┘ō§╬╗Ą─ūų╣Ø(ji©”)ūā┴┐)ĪóVW50(┤µĘ┼▐D(zhu©Żn)╦┘Ą─ūųūā┴┐Ż¼╝┤├}ø_īÆČ╚)ĪóVB100(░╦┼─▀M(j©¼n)Įo┐žųŲĄ─ūų╣Ø(ji©”)ūā┴┐)ĪŻ
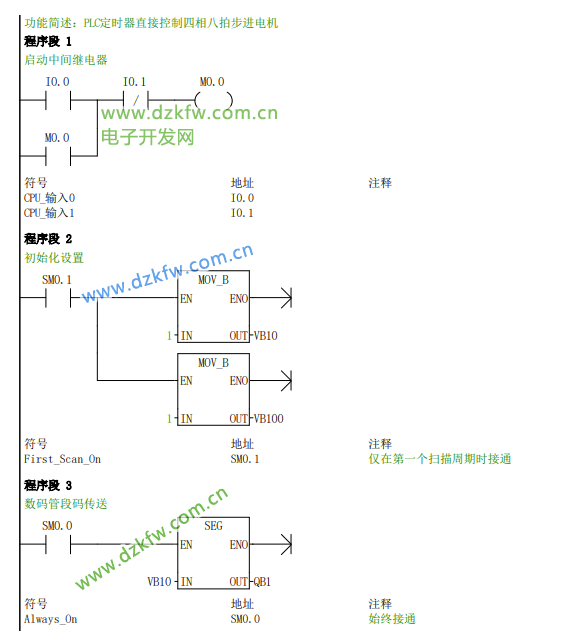
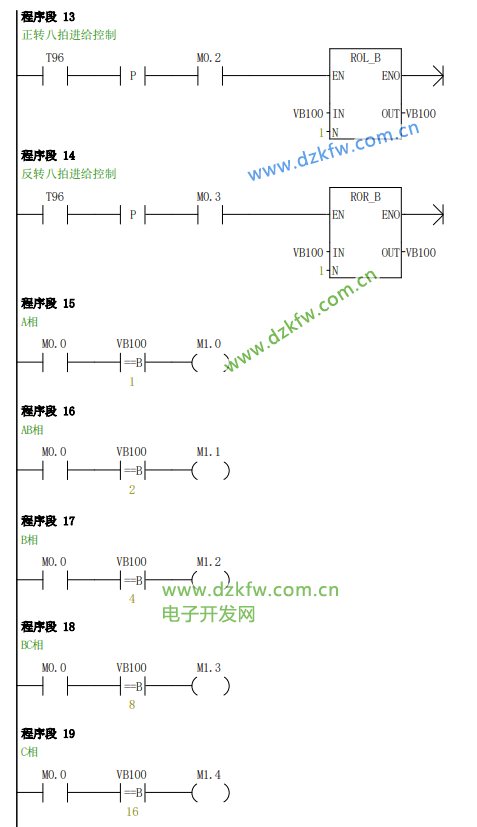
▀@└’ę¬╠ßąčĖ„╬╗ę╗éĆ(g©©)╬ęį┌ŠÄ│╠ųą║÷┬įĄ─å¢Ņ}Ż║
į┌┐žųŲ├}ø_Ą─│╠ą“▓┐Ęų╬ęŽ╚╩Ūīæ┴╦╚ńŽ┬Ą─╠▌ą╬łDŻ¼ĮY(ji©”)╣¹░l(f©Ī)¼F(xi©żn)▌ö│÷└^ļŖŲ„┤µį┌å¢Ņ}Ż¼ø]ėą░┤šš╬ę│╠ą“▌ö│÷Ż¼Ą½╩Ū▄ø╝■╔Ž’@╩ŠĄ─╩Ūø]ėąå¢Ņ}Ż¼▌ö│÷└^ļŖŲ„Š∙┐╔š²│Ż▌ö│÷ĪŻ╬ęŽ╚╩Ū▓┴╦įć“×(y©żn)ŽõŻ¼“×(y©żn)ūC┴╦▓Į▀M(j©¼n)ļŖÖC(j©®)╩Ūø]ėąå¢Ņ}Ą─Ż¼╚╗║¾╩╣ė├ļŖį┤ę└┤╬ĮoČ©ūėŠĆ╚”░┤šš┐žųŲ┤╬ą“ę└┤╬╣®ļŖŻ¼░l(f©Ī)¼F(xi©żn)┐╔ęįš²│Ż▀\(y©┤n)▐D(zhu©Żn)ĪŻ╣╩Ż¼┐ŽČ©╩Ū│╠ą“┤µį┌å¢Ņ}ĪŻå¢Ņ}Š═╩Ū▌ö│÷└^ļŖŲ„ŠĆ╚”▓╗─▄ųžÅ═(f©┤)╩╣ė├Ż¼╚ńŽ┬łDŻ║
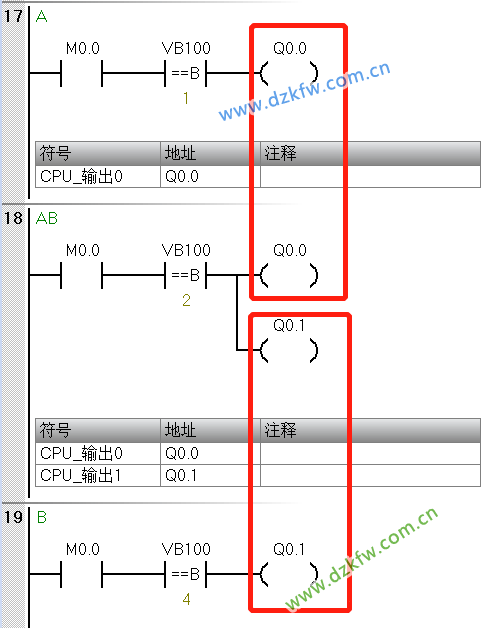
ĮŌøQĘĮĘ©Š═╩Ū╩╣ė├ę╗ĮMųąķg└^ļŖŲ„üĒū„×ķ8┼─Ą─▌ö│÷Ż¼į┘ė├▀@ą®ųąķg└^ļŖŲ„╚ź┐žųŲšµš²Ą─▌ö│÷ABCD╦─ŽÓĄ─ŠĆ╚”ĪŻ
║¾ėø
═Ļ│╔PLCų▒Įė┐žųŲ▓Į▀M(j©¼n)ļŖÖC(j©®)ī”╬ęČ°čįø]ėą╠½┤¾ļyČ╚ĪŻĄ½▀@┤╬įO(sh©©)ėŗ(j©¼)ę▓Ėąė|ŅH╔ŅŻ¼▒Šęį×ķūį╝║īW(xu©”)Ą─▀ĆąąĪŻš{(di©żo)įć░ļ╠ņšę▓╗│÷├½▓ĪŻ¼ą┼╩─Ą®Ą®ĄžėXĄ├ūį╝║Ą─│╠ą“╩Ūø]ėąå¢Ņ}Ą─ĪŻ▓ĮŌīŹ(sh©¬)“×(y©żn)ŽõŻ¼å╬¬Ü(d©▓)š{(di©żo)įć▓Į▀M(j©¼n)ļŖÖC(j©®)¤o╣¹║¾Ż¼└ŽÄ¤ę╗šZĄ└ŲŲ╠ņÖC(j©®)Ż¼▌ö│÷└^ļŖŲ„ŠĆ╚”▓╗─▄ųžÅ═(f©┤)╩╣ė├Ż¼ĘĮėXūį╝║Ą─¤oų¬┼c├ņąĪĪŻīW(xu©”)║Ż¤oč─Ė³¤oų╣Š│Ż¼ę╗ų¬░ļĮŌ┘Oą”┤¾ĘĮĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū