
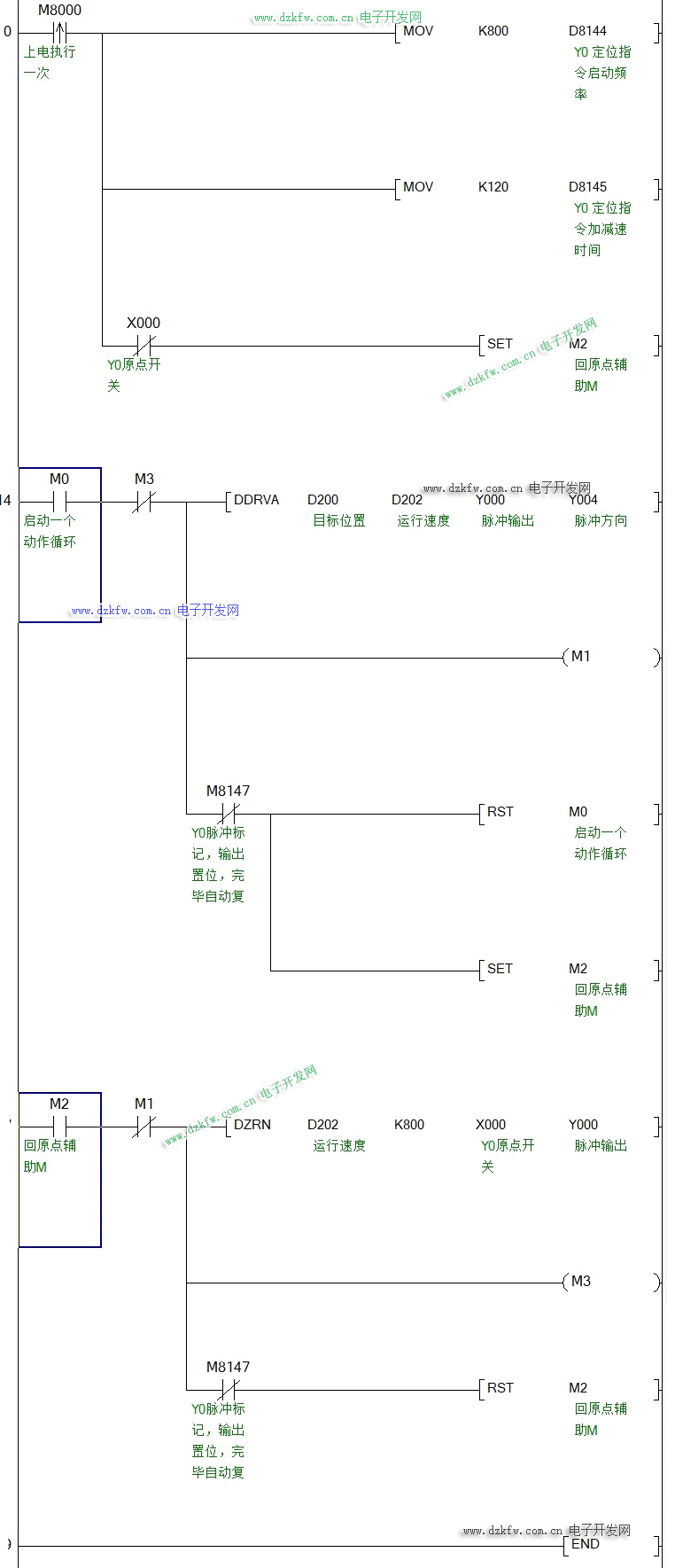
╔ŽļŖ║¾╩ūŽ╚ĮoČ©╬╗ųĖ┴Ņåóäė(d©░ng)Ņl┬╩Īó╝ė£p╦┘Ģr(sh©¬)ķg┘xųĄĪŻY0├}ø_▌ö│÷ī”(du©¼)æ¬(y©®ng)Ż©D8144,D8145Ż®ĪŻ╚ń╣¹Y0įŁ³c(di©Żn)ķ_ĻP(gu©Īn)ø]ėąĮė═©Ż¼ätł╠(zh©¬)ąą╗žįŁ³c(di©Żn)äė(d©░ng)ū„ĪŻ
ų├╬╗M0åóäė(d©░ng)ę╗éĆ(g©©)裣h(hu©ón)Ż¼DDRVAŽ╚ąąū▀ĄĮ─┐ś╦(bi©Īo)╬╗ų├Ż©D200Ż®Ż¼DDRVAåóäė(d©░ng)║¾Y0Ą─├}ø_▌ö│÷ś╦(bi©Īo)ėøM8147ūįäė(d©░ng)ų├╬╗ĪŻĄĮ╬╗║¾M8147Ģ■(hu©¼)ūįäė(d©░ng)Å═(f©┤)╬╗,│╠ą“Ė∙ō■(j©┤)M8147ĀŅæB(t©żi)ł╠(zh©¬)ąąŽ┬ę╗▓Įäė(d©░ng)ū„Ż¼įō└²│╠╩Ū±R╔Žł╠(zh©¬)ąą╗žįŁ³c(di©Żn)äė(d©░ng)ū„ĪŻ╗žįŁ³c(di©Żn)ųĖ┴ŅĄ┌ę╗éĆ(g©©)ģóöĄ(sh©┤)╩Ū▀\(y©┤n)ąąŅl┬╩Ż¼Ą┌Č■éĆ(g©©)ģóöĄ(sh©┤)╩ŪĄ═╦┘Ņl┬╩Ż¼įō╗žįŁ³c(di©Żn)ųĖ┴ŅĦūįäė(d©░ng)╝ė£p╦┘äė(d©░ng)ū„ĪŻ╗žįŁ³c(di©Żn)Ģr(sh©¬)įŁ³c(di©Żn)ķ_ĻP(gu©Īn)Įė═©Ż¼Ė∙ō■(j©┤)D8072Ż©ĄĮįŁ³c(di©Żn)║¾Ą─┼└ąą├}ø_öĄ(sh©┤)Ż®Ą─ųĄ┤_Č©±R╔Ž═Żų╣╗“└^└m(x©┤)ąąū▀ÄūéĆ(g©©)├}ø_╚╗║¾į┘═Żų╣ĪŻ ╚²┴ŌPLC“ī(q©▒)äė(d©░ng)╦┼Ę■ļŖÖC(j©®)Ą─╠▌ą╬łD│╠ą“╚ńŽ┬Ż║
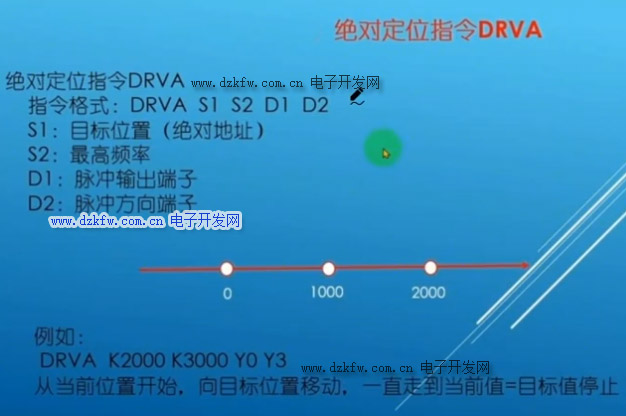
Į^ī”(du©¼)Č©╬╗ųĖ┴Ņ DRVA(DDRVA)šf├„Ż║
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō(y©©)├µ
╦óą┬Ēō(y©©)├µ Ž┬ĄĮĒō(y©©)Ąū
Ž┬ĄĮĒō(y©©)Ąū