
įÆšf▀\(y©┤n)äė(d©░ng)┐žųŲŻ¼┤¾╝ęĄ┌ę╗Ģr(sh©¬)ķgŽļĄĮĄ─╩Ū▓Į▀M(j©¼n)Īó╦┼Ę■ĪóļŖÖC(j©®)Ą╚ę╗ŽĄ┴ą├¹į~Ż¼─Ū├┤▒žĒÜꬊÄīæ│╠ą“▓┼─▄š{(di©żo)įć║═┐žųŲ▓Į▀M(j©¼n)ļŖÖC(j©®)å߯┐«ö(d©Īng)╚╗▓╗╩ŪŻ¼į┌╬ęéāS7-200SMART PLCųą┐╔ęį═©Ą└▀\(y©┤n)äė(d©░ng)Ž“?q©▒)¦ĮMæB(t©żi)║¾į┘▀M(j©¼n)ąą▀\(y©┤n)äė(d©░ng)┐žųŲ├µ░Õ▀M(j©¼n)ąą║å(ji©Żn)å╬Ą─š{(di©żo)įć║═┐žųŲŻ¼ĮėŽ┬üĒŠ═Ħ┤¾╝ęüĒę╗▓Įę╗▓ĮīŹ(sh©¬)¼F(xi©żn)▀@éĆ(g©©)╣”─▄ĪŻ
ę╗Īó╗∙▒ŠĖ┼─ŅS7-200SMARTŽĄ┴ąī”(du©¼)æ¬(y©®ng)ś╦(bi©Īo)£╩(zh©│n)ą═Ą─Š¦¾w╣▄▌ö│÷ą═PLC┐╔ęįų¦│ų100KHZĄ─Ė▀╦┘├}ø_▌ö│÷Ż¼│²ST20Ą─CPUų¦│ų2▌SĄ─Ė▀╦┘├}ø_▌ö│÷═ŌŻ¼ŲõėÓCPU┐╔ęįų¦│ų3▌SĄ─Ė▀╦┘├}ø_▌ö│÷ĪŻ
▓ĮŠžĮŪŻ║├┐▌ö╚ļę╗éĆ(g©©)├}ø_ą┼╠¢(h©żo)Ģr(sh©¬)Ż¼ļŖÖC(j©®)▐D(zhu©Żn)ūė▐D(zhu©Żn)▀^Ą─ĮŪČ╚ĘQ×ķ▓ĮŠžĮŪĪŻ▓ĮŠžĮŪĄ─┤¾ąĪ┐╔ęįų▒Įėė░ĒæļŖÖC(j©®)Ą─▀\(y©┤n)ąąŠ½Č╚ĪŻ
╝Ü(x©¼)ĘųŻ║╝Ü(x©¼)Ęų╩ŪųĖļŖÖC(j©®)▀\(y©┤n)ąąĢr(sh©¬)Ą─īŹ(sh©¬)ļH▓ĮŠžĮŪ╩Ū╗∙▒Š▓ĮŠžĮŪĄ─ÄūĘųų«ę╗ĪŻ
Č■Īó▓Į▀M(j©¼n)“ī(q©▒)äė(d©░ng)Ų„ĮėŠĆ┼c╝Ü(x©¼)ĘųļŖ┴„įO(sh©©)ų├Ą┌ę╗▓ĮŻ║Ż©▓Į▀M(j©¼n)“ī(q©▒)äė(d©░ng)Ų„ĮėŠĆŻ®

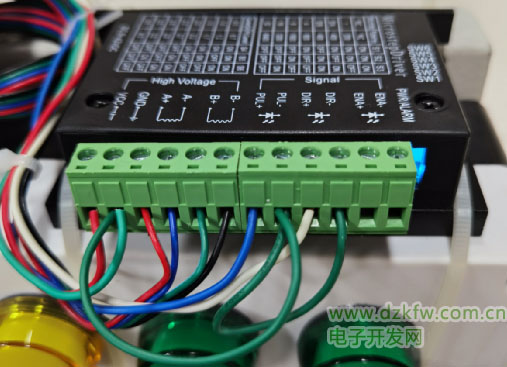
Ą┌Č■▓ĮŻ║Ż©╝Ü(x©¼)Ęų┼cŅ~Č©ļŖ┴„ō▄┤aŻ®


Ė∙ō■(j©┤)ęį╔Ž╚²ÅłłDŲ¼┐╔Ą├
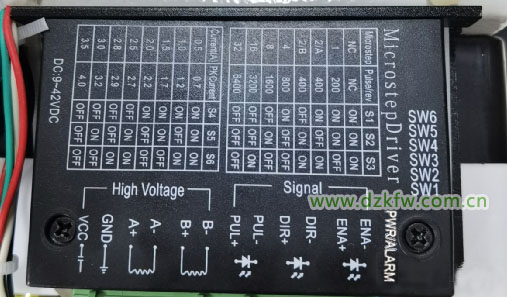
╝Ü(x©¼)Ęų×ķŻ║ļŖÖC(j©®)ę╗▐D(zhu©Żn)ąĶꬥ─├}ø_öĄ(sh©┤)1600Ż¼SW1ĪóSW2ĪóSW3Ęųäe×ķŻ║OFFĪóONĪóOFF
Ņ~Č©ļŖ┴„Ż║Ņ~Č©ļŖ┴„╩Ū1.2AŻ¼Ė∙ō■(j©┤)1.2A┐╔į┌▓Į▀M(j©¼n)“ī(q©▒)äė(d©░ng)Ų„╔Žō▄┤aSW4ĪóSW5ĪóSW6Ęųäe×ķŻ║ONĪóOFFĪóON
╚²ĪóŠÄ│╠▄ø╝■ĮMæB(t©żi)┼õų├▀\(y©┤n)äė(d©░ng)Ž“?q©▒)?/STRONG>Ą┌ę╗▓ĮŻ║Ż©STEP 7-MicroWIN SMARTŠÄ│╠▄ø╝■Ī¬ū¾╔ŽĮŪ▓╦å╬Ö┌Ī¬╣żŠ▀Ī¬▀\(y©┤n)äė(d©░ng)Ż®

Ą┌Č■▓ĮŻ║Ż©▀xō±ĮMæB(t©żi)▌S0Ż®
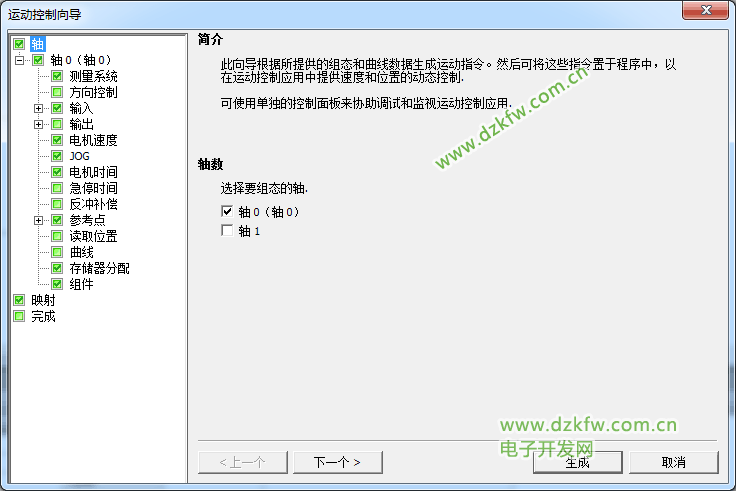
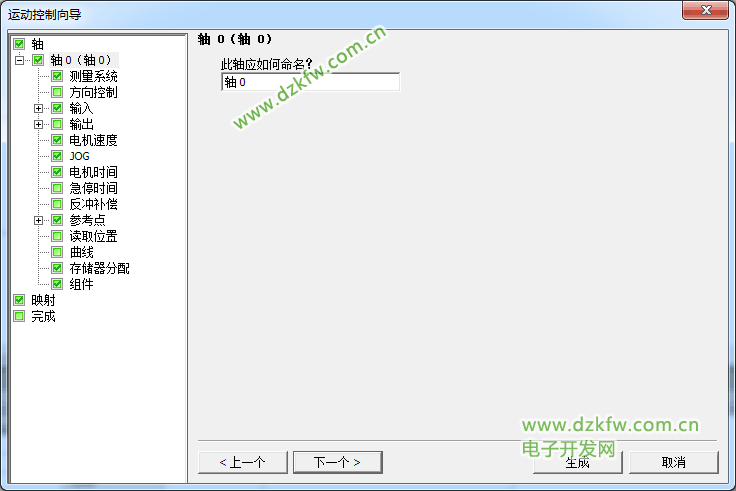
Ą┌╚²▓ĮŻ║Ż©Ė∙ō■(j©┤)ūį╝║Ą─ęŌįĖüĒįO(sh©©)ų├▌S├¹ĘQŻ®
Ą┌╦─▓ĮŻ║Ż©£y(c©©)┴┐ŽĄĮy(t©»ng)å╬╬╗Ī¬╣ż│╠å╬╬╗Ī¬ļŖÖC(j©®)ę╗┤╬ą²▐D(zhu©Żn)ąĶꬥ─├}ø_öĄ(sh©┤)1600Ī¬£y(c©©)┴┐Ą─╗∙▒Šå╬╬╗Ī¬MMĪ¬ļŖÖC(j©®)ę╗┤╬ą²▐D(zhu©Żn)«a(ch©Żn)╔·ČÓ╔┘ŠÓļxĄ─▀\(y©┤n)äė(d©░ng)Ī¬2.0Ż®
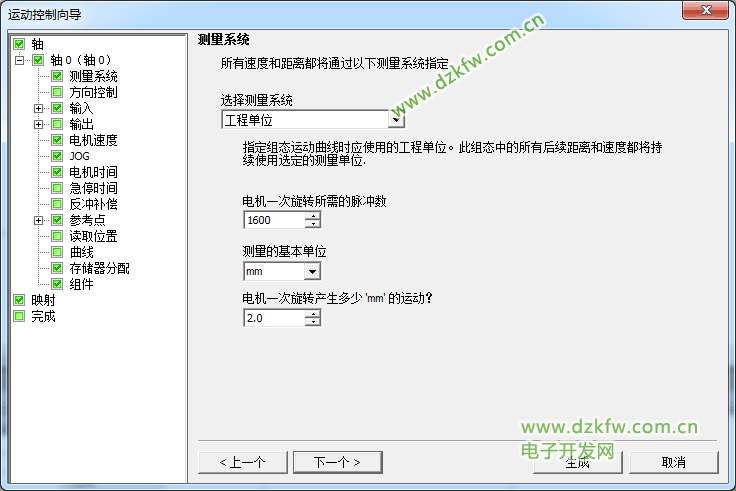
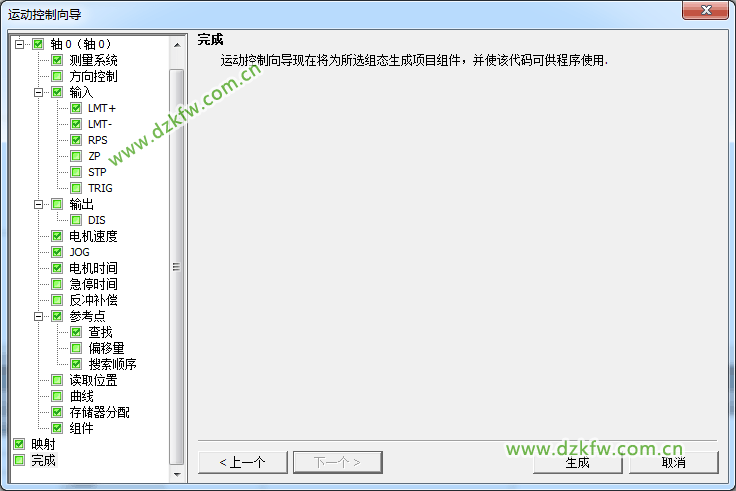
Ą┌╬Õ▓ĮŻ║Ż©ĘĮŽ“┐žųŲĪ¬ŽÓ╬╗Ī¬å╬ŽÓ2▌ö│÷Ī¬śOąįĪ¬š²Ż®
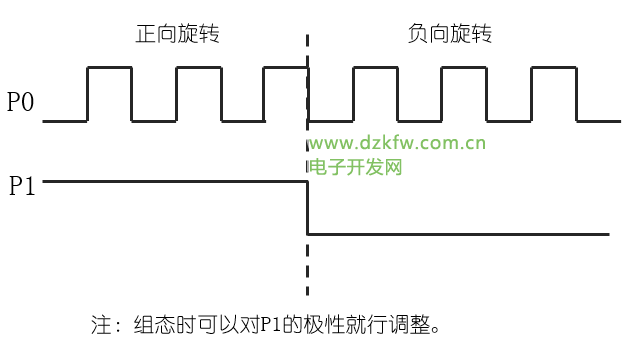
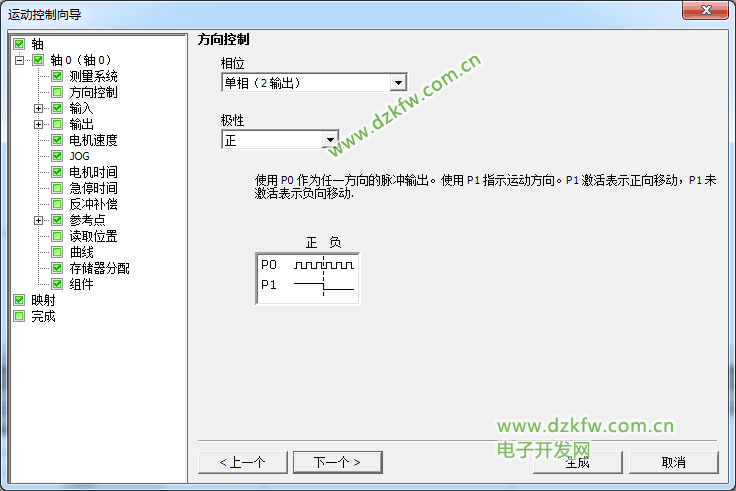
å╬ŽÓŻ©2▌ö│÷Ż®Ż║ĮMæB(t©żi)Ģr(sh©¬)╚ń╣¹▀xō±å╬ŽÓā╔▌ö│÷Ż¼ätę╗éĆ(g©©)▌ö│÷Ż©P0Ż®┐žųŲ├}ø_Ż¼┴Ēę╗éĆ(g©©)▌ö│÷Ż©P1Ż®┐žųŲĘĮŽ“ĪŻ╚ń╣¹ąĶ꬚²Ž“▀\(y©┤n)ąąĢr(sh©¬)Ż¼ätP1×ķĖ▀ļŖŲĮėąą¦Ż¼╚ń╣¹ąĶ꬞ō(f©┤)Ž“▀\(y©┤n)ąąĢr(sh©¬)Ż¼ätP1╬╗Ą═ļŖŲĮėąą¦ĪŻ
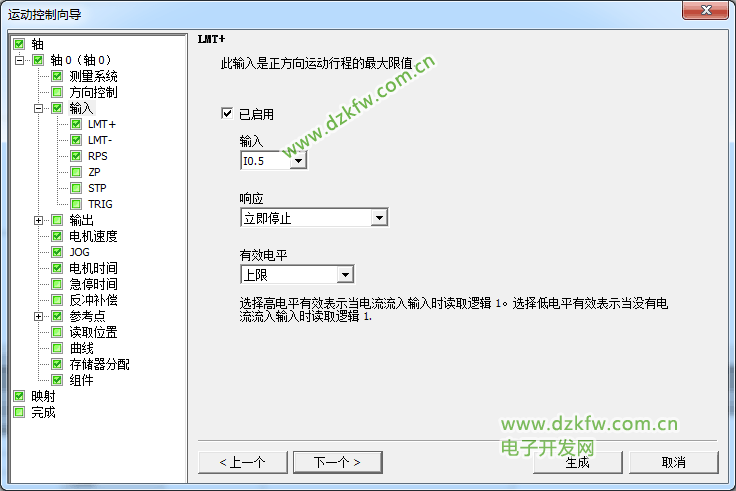
Ą┌╬Õ▓ĮŻ║Ż©š²Ž▐╬╗Ī¬åóė├Ī¬▌ö╚ļI0.5Ī¬Ēææ¬(y©®ng)Ī¬┴ó╝┤═Żų╣Ī¬ėąą¦ļŖŲĮĪ¬╔ŽŽ▐Ż®
▌ö╚ļI0.5╩ŪĖ∙ō■(j©┤)─ŃīŹ(sh©¬)ļHįO(sh©©)éõš²Ž▐╬╗ķ_ĻP(gu©Īn)┼cPLCĮėŠĆ▌ö╚ļ³c(di©Żn)Ą├üĒĄ─ĪŻ
ėąą¦ļŖŲĮ×ķ╩▓├┤Ģ■(hu©¼)╩Ū╔ŽŽ▐─žŻ┐ę“?y©żn)ķ╔ŽŽ▐╩ŪĮė│Żķ_Ėąæ¬(y©®ng)ĄĮĮė═©ūā│╔│Żķ]Ż¼Ž┬Ž▐Ę┤ų«ĪŻ
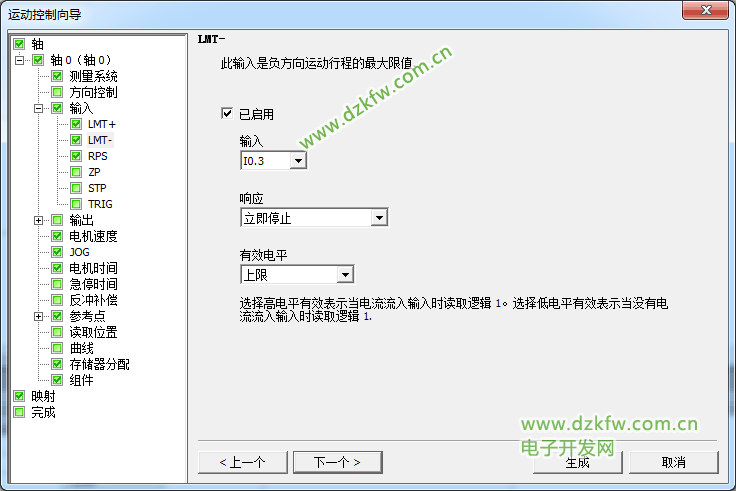
Ą┌┴∙▓ĮŻ║Ż©žō(f©┤)Ž▐╬╗Ī¬åóė├Ī¬▌ö╚ļI0.3Ī¬Ēææ¬(y©®ng)Ī¬┴ó╝┤═Żų╣Ī¬ėąą¦ļŖŲĮĪ¬╔ŽŽ▐Ż®
▌ö╚ļI0.3╩ŪĖ∙ō■(j©┤)─ŃīŹ(sh©¬)ļHįO(sh©©)éõžō(f©┤)Ž▐╬╗ķ_ĻP(gu©Īn)┼cPLCĮėŠĆ▌ö╚ļ³c(di©Żn)Ą├üĒĄ─ĪŻ
ėąą¦ļŖŲĮ×ķ╩▓├┤Ģ■(hu©¼)╩Ū╔ŽŽ▐─žŻ┐ę“?y©żn)ķ╔ŽŽ▐╩ŪĮė│Żķ_Ėąæ¬(y©®ng)ĄĮĮė═©ūā│╔│Żķ]Ż¼Ž┬Ž▐Ę┤ų«ĪŻ
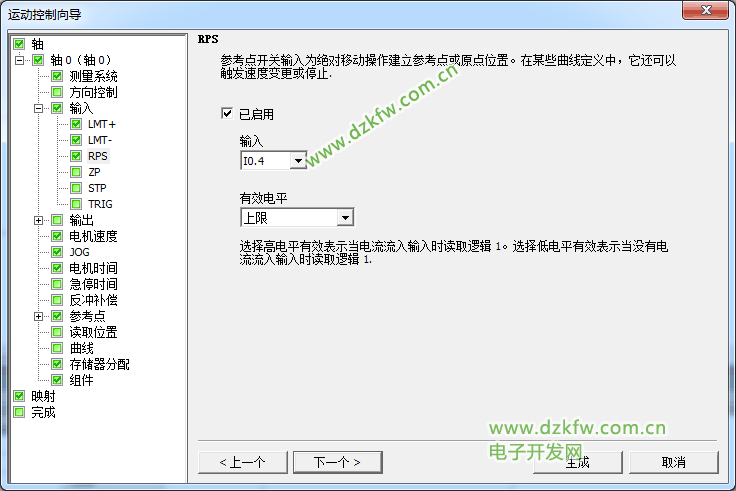
Ą┌Ų▀▓ĮŻ║Ż©╗žįŁ³c(di©Żn)Ī¬åóė├Ī¬▌ö╚ļĪ¬I0.4Ī¬ėąą¦ļŖŲĮĪ¬╔ŽŽ▐Ż®
▌ö╚ļI0.4╩ŪĖ∙ō■(j©┤)─ŃīŹ(sh©¬)ļHįO(sh©©)éõįŁ³c(di©Żn)Ž▐╬╗ķ_ĻP(gu©Īn)┼cPLCĮėŠĆ▌ö╚ļ³c(di©Żn)Ą├üĒĄ─ĪŻ
ėąą¦ļŖŲĮ×ķ╩▓├┤Ģ■(hu©¼)╩Ū╔ŽŽ▐─žŻ┐ę“?y©żn)ķ╔ŽŽ▐╩ŪĮė│Żķ_Ėąæ¬(y©®ng)ĄĮĮė═©ūā│╔│Żķ]Ż¼Ž┬Ž▐Ę┤ų«ĪŻ
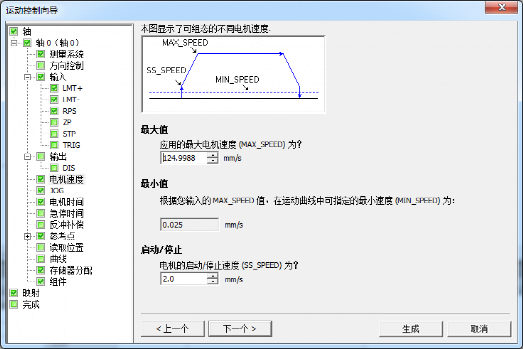
Ą┌░╦▓ĮŻ║Ż©ūŅ┤¾ųĄĪ¬ūŅ┤¾ļŖÖC(j©®)╦┘Č╚Ī¬124.9988Ī¬ūŅąĪųĄĪ¬0.025Ī¬åóäė(d©░ng)/═Żų╣Ī¬2.0MM├┐├ļŻ®
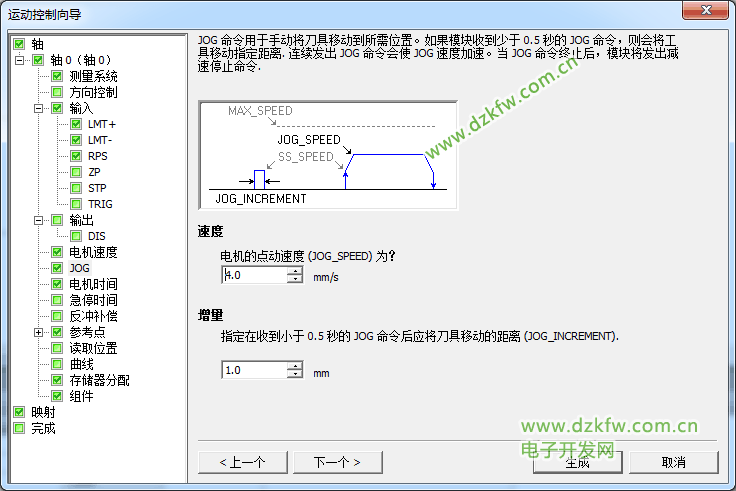
Ą┌Š┼▓ĮŻ║Ż©³c(di©Żn)äė(d©░ng)╦┘Č╚Ī¬4.0MM├┐├ļĪ¬į÷┴┐Ī¬1.0Ż®
Ą┌╩«▓ĮŻ║Ż©åóė├Ī¬RPSģó┐╝³c(di©Żn)Ż¼Ę±ät▓╗─▄╗žįŁ³c(di©Żn)Ż®
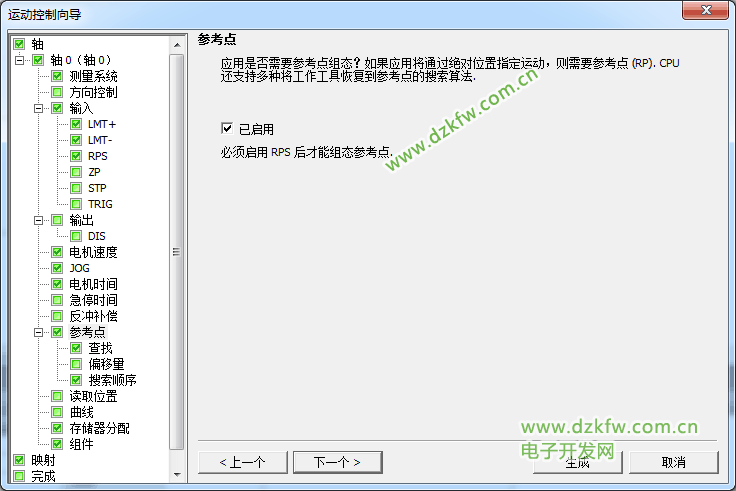
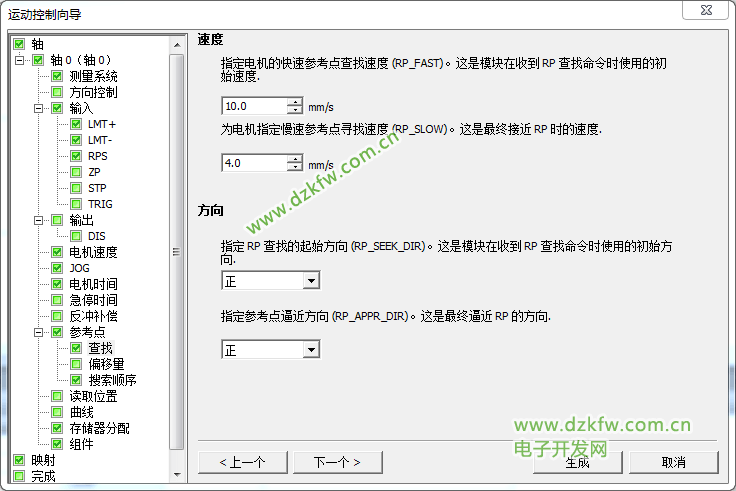
Ą┌╩«ę╗▓ĮŻ║Ż©╦┘Č╚Ī¬╗žįŁ³c(di©Żn)╦┘Č╚Ī¬10.0MM├┐├ļĪ¬ĮėĮ³ģó┐╝³c(di©Żn)╦┘Č╚Ī¬4.0Ī¬ĘĮŽ“Č╝╩Ūš²Ż®
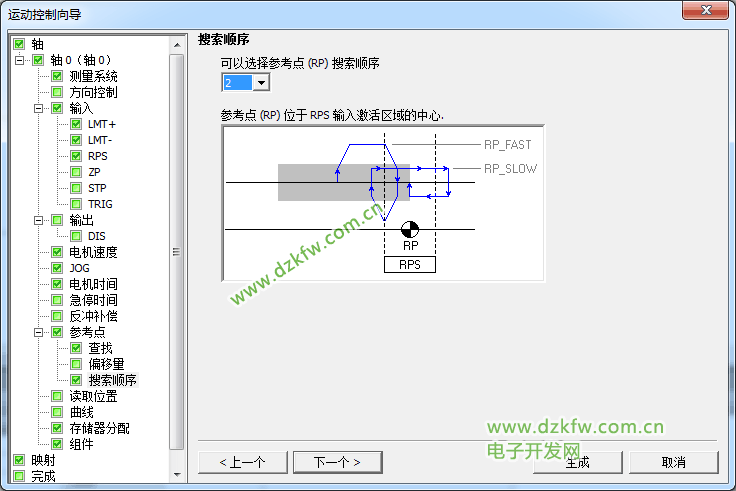
Ą┌╩«Č■▓ĮŻ║Ż©2╠¢(h©żo)─Ż╩ĮŻ®
Ą┌╩«╚²▓ĮŻ║Ż©Ęų┼õ┤µā”(ch©│)Ų„ĄžųĘŻ®
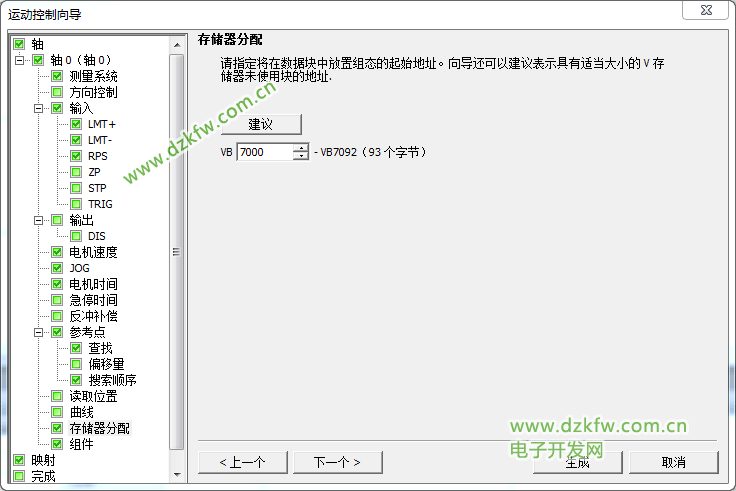
Ą┌╩«╦─▓ĮŻ║Ż©³c(di©Żn)ō¶╔·│╔╝┤┐╔Ż®
Ą┌ę╗▓ĮŻ║Ż©░čĮMæB(t©żi)┼õų├║├Ą─▀\(y©┤n)äė(d©░ng)Ž“?q©▒)¦Ž┬▌dĄĮPLCŻ®
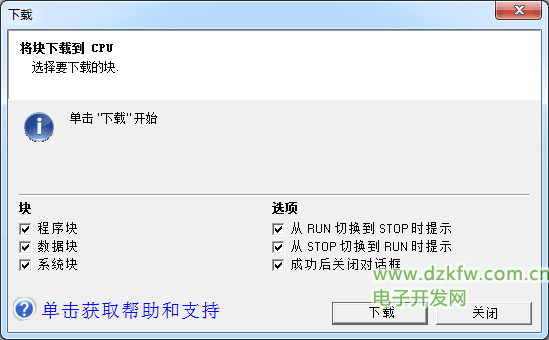
Ą┌Č■▓ĮŻ║Ż©ę╗Č©ę¬░čPLCš{(di©żo)ųŲĄĮSTOPĀŅæB(t©żi)▓╗─▄×ķRUN▀\(y©┤n)ąąŻ¼ę“?y©żn)ķ▀\(y©┤n)äė(d©░ng)┐žųŲš{(di©żo)įć├µ░Õų╗─▄į┌STOPĀŅæB(t©żi)▀\(y©┤n)ąą┼cš{(di©żo)į毮

![]()
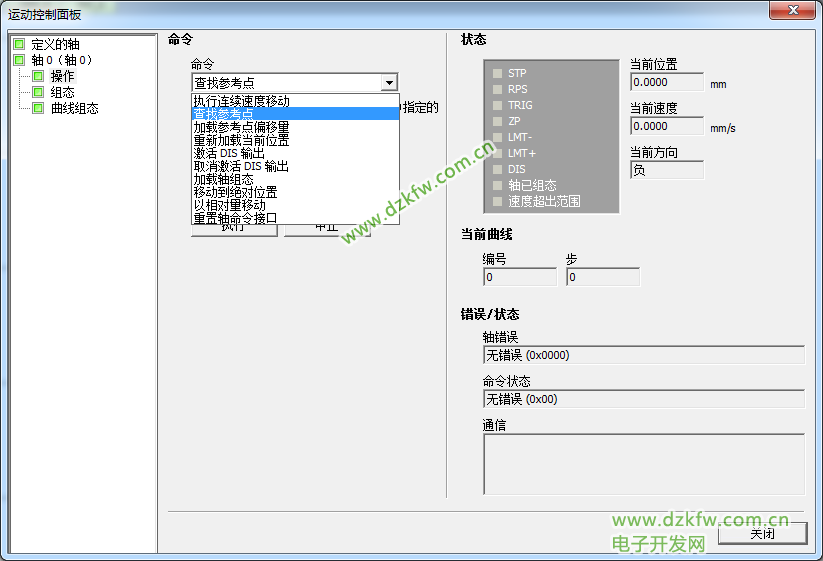
Ą┌╚²▓ĮŻ║Ż©STEP 7-MicroWIN SMARTŠÄ│╠▄ø╝■Ī¬ū¾╔ŽĮŪ▓╦å╬Ö┌Ī¬╣żŠ▀Ī¬▀\(y©┤n)äė(d©░ng)┐žųŲ├µ░ÕŻ®

Ą┌╦─▓ĮŻ║Ż©ķ_╩╝╬ęéā┐╔ęį▀xō±▓ķšęģó┐╝³c(di©Żn)Ż¼ę▓Š═╩Ū╗žįŁ³c(di©Żn)Ż®
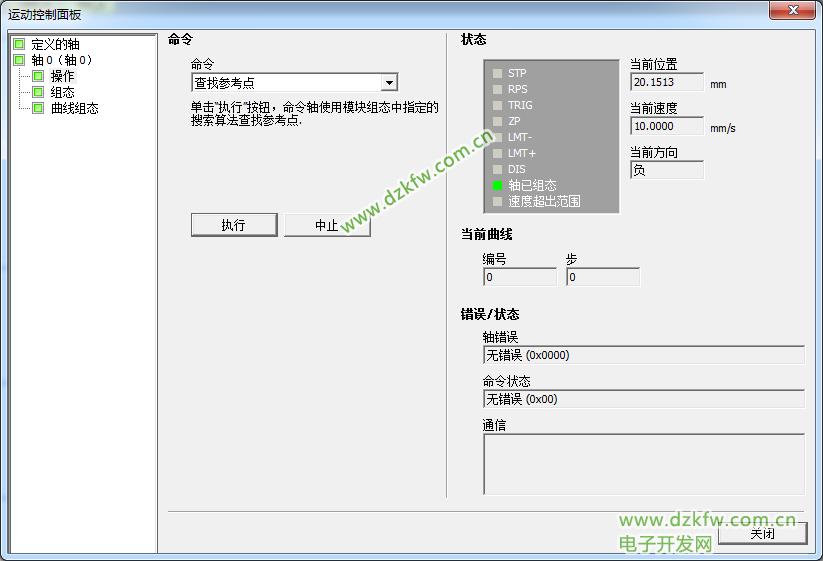
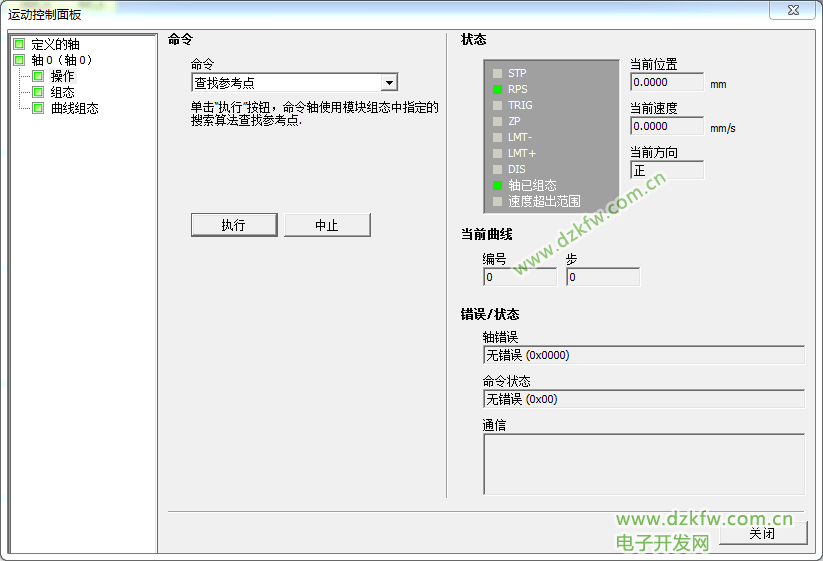
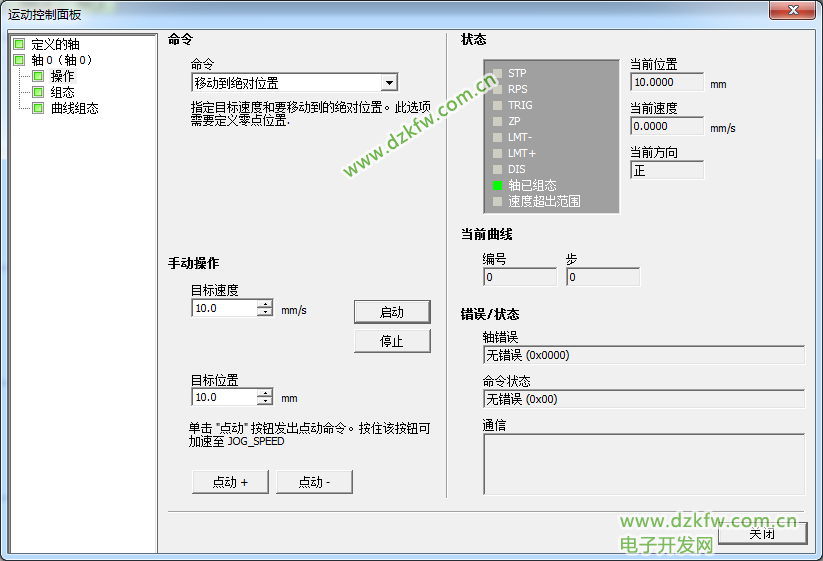
Ą┌╬Õ▓ĮŻ║Ż©Į^ī”(du©¼)╬╗ų├ęŲäė(d©░ng)Ż®
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū