
FX1Sļm╚╗ĘŪ│Ż└Ž┼fŻ¼Ą½Č©╬╗ųĖ┴Ņģs╗∙▒Š╩Ū²R╚½Ą─Ż¼╦∙ęįŠ═─├üĒīW(xu©”)┴Ģ(x©¬)ė├PLC┐žųŲ╦┼Ę■ļŖÖC(j©®)┴╦ĪŻūóęŌę╗Č©ę¬╩ŪŠ¦¾w╣▄▌ö│÷ŅÉą═Ą─▓┼┐╔ęį▌ö│÷├}ø_Ż¼Č°ŪęFX1Sų╗ėąY0║═Y1ā╔éĆ├}ø_▌ö│÷┐┌ĪŻ
1ĪóĮėŠĆ
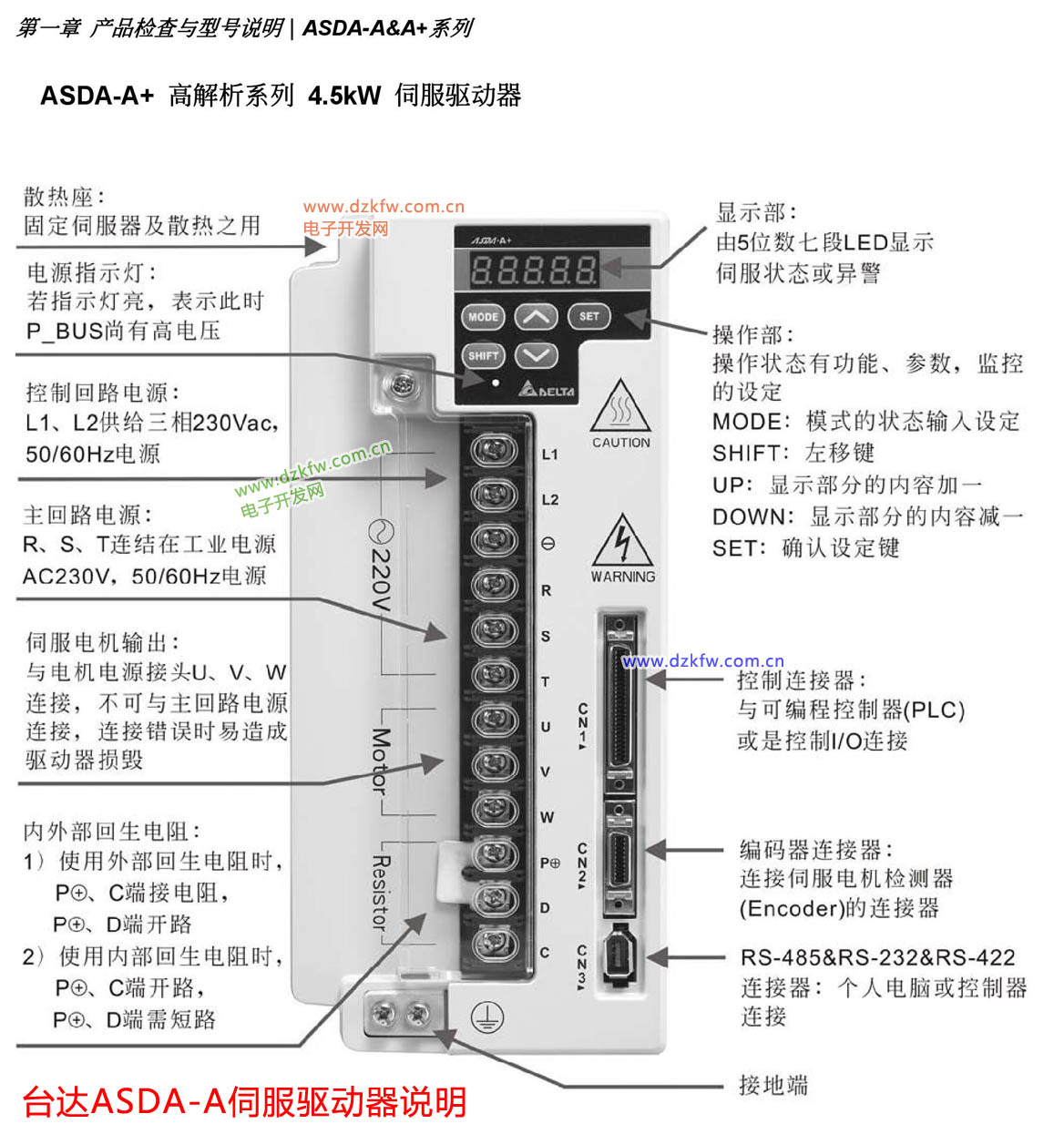
╦┼Ę■“ī(q©▒)äėŲ„ų„╗ž┬ĘĄ─ŠĆ▒╚▌^║├ĮėŻ¼ų„ę¬╩Ūų„ļŖį┤ŠĆĪó┐žųŲļŖį┤ŠĆŻ¼ęį▀BĮė╦┼Ę■ļŖÖC(j©®)Ą─ļŖį┤ŠĆĪŻŠÄ┤aŲ„ŠĆ╩ŪČ╦ūėų▒Įė▓ÕĮėĄ─Ż¼▓╗ė├¤®╔±ĪŻ┬ķ¤®ę╗³c(di©Żn)Ą─Š═╩ŪCN2┐žųŲą┼╠¢ŠĆĪŻ
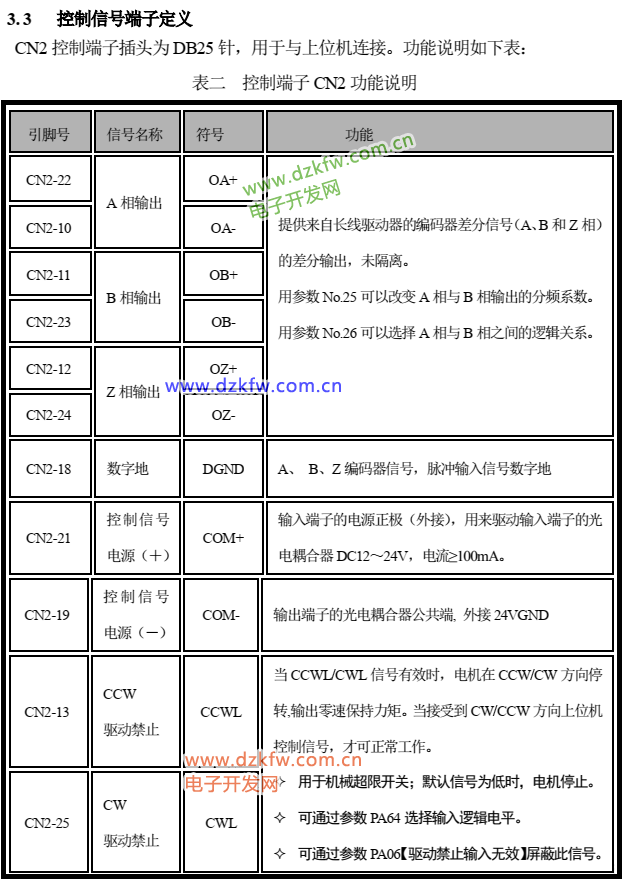
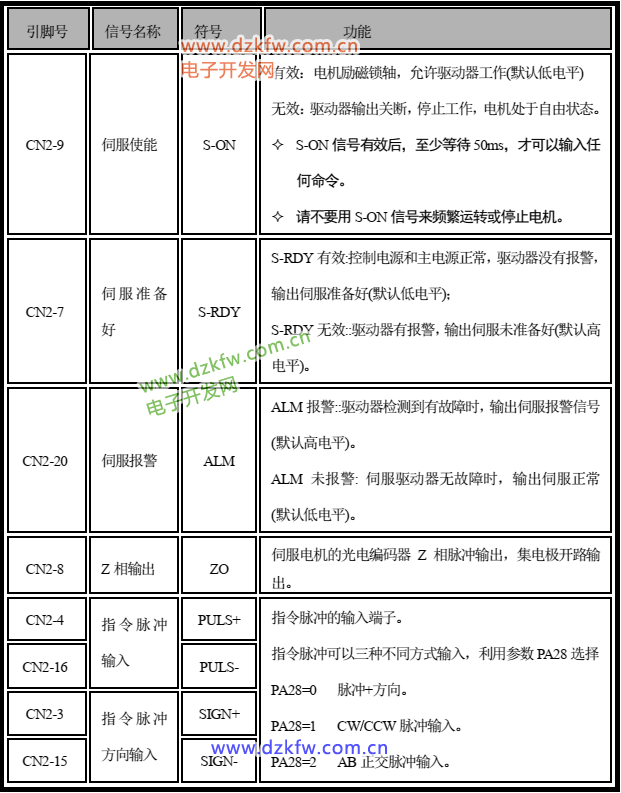
╩ūŽ╚ę¬▓ķ┐┤╦┼Ę■“ī(q©▒)äėŲ„šf├„Ģ°Ż¼šęĄĮCN2Ė„éĆČ╦ūėČ©┴xŻ¼╩Š└²╚ńŽ┬łDĪŻī”ė┌ūŅ║åå╬═¼Ģrę▓╩ŪūŅ│Żė├Ą─Ī░╬╗ų├+ĘĮŽ“Ī▒┐žųŲĘĮ╩ĮüĒšfŻ¼šęĄĮ┐žųŲļŖį┤ŠĆ+ŻŁĪó╦┼Ę■╩╣─▄Īó├}ø_▌ö╚ļpuls+ -Īó├}ø_ĘĮŽ“sign+ŻŁ┐é╣▓7éĆČ╦┐┌Ż¼╚╗║¾ė├╚fė├▒Ēšę│÷7éĆę²─_ī”æ¬(y©®ng)Ą─ŠĆĪŻ┐žųŲļŖį┤ŠĆ+Īópuls+Īósign+Š∙ĮėļŖį┤24+Ż¼┐žųŲļŖį┤ŠĆŻŁĮėCOMŻ¼puls+ĮėPLCĄ─Y0╗“Y1Ż¼╦┼Ę■╩╣─▄Īósign-ĮėPLC│²Y0║═Y1═ŌĄ─╚╬ęŌę╗éĆ▌ö│÷Č╦ūėŠ∙┐╔ĪŻ
ūóęŌ▒▄├Ō╬ęäéķ_╩╝ĘĖĄ─Õeš`Ż║FX1SĄ─▌ö│÷Č╦ūė╩ŪĘųĮMĄ─Ż¼ėą║├ÄūéĆ╣½╣▓Č╦╚ńCOMĪóCOM1ĪóCOM2ĪŁĪŁĄ╚Ż¼╦³éāų«ķg╩Ū╗źŽÓ▓╗═©Ą─ĪŻ╦∙ęį╚ń╣¹puls+Īó╦┼Ę■╩╣─▄Īósign-║═COM▓╗į┌═¼ę╗ĮMŻ¼Š═▓╗─▄ą╬│╔╗ž┬ĘŻ¼ĮėŠĆ¤oą¦ĪŻ╦∙ęįūŅ║├░čĖ„éĆCOM┐┌▀BĮėŲüĒŻ¼ęį┤_▒ŻĮėŠĆ▓╗│÷ÕeĪŻ
Įė║├ŠĆ║¾ÅŖ(qi©óng)ųŲ╦┼Ę■╩╣─▄Č╦┐┌ėą▌ö│÷Ż¼╚╗║¾ė├╩ų▐D(zhu©Żn)äė╦┼ļŖÖC(j©®)Ą─▌SŻ¼╚ń╣¹▌S▐D(zhu©Żn)▓╗äė▒╗µiČ©┴╦Ż¼šf├„╦┼Ę■╩╣─▄ĮėŠĆø]å¢Ņ}Ż╗╚ń╣¹▌S─▄ūįė╔▐D(zhu©Żn)äėŻ¼─ŪŠ═ę¬Öz▓ķ╦┼Ę■╩╣─▄Ą─ĮėŠĆĪŻ
2Īóš{(di©żo)įć
ŠĆĮė║├║¾Ż¼į┌PLCųąīæ╚ļPLSY├}ø_▌ö│÷šZŠõĪŻ╚ń╣¹╦┼Ę■ļŖÖC(j©®)ø]ėąäėū„Ż¼Ž╚Öz▓ķPLCųąD8140Ą─ųĄĪŻįō╝─┤µŲ„▒Ż┤µ├}ø_▌ö│÷Ą─éĆöĄ(sh©┤)Ż¼╚ń╣¹Ųõ×ķ0Ż¼▒Ē╩ŠPLCø]ėą▌ö│÷├}ø_Ż╗Ųõ┤╬Öz▓ķ╦┼Ę■“ī(q©▒)äėŲ„Ą─ģóöĄ(sh©┤)▒O(ji©Īn)ęĢĒŚ(xi©żng)ųąĄ─├}ø_Įė╩šģóöĄ(sh©┤)ėąø]ėąöĄ(sh©┤)ųĄĪŻ
3Īó├}ø_▌ö│÷ųĖ┴ŅPLSY
║¼┴xŻ║Plus-YĪŻ├}ø_▌ö│÷ųĖ┴Ņ(D)PLSY: (D)PLSY + ├}ø_Ņl┬╩(öĄ(sh©┤)ųĄ/ūųį¬╝■) + ├}ø_éĆöĄ(sh©┤) + ├}ø_▌ö│÷┐┌(Y0/Y1)
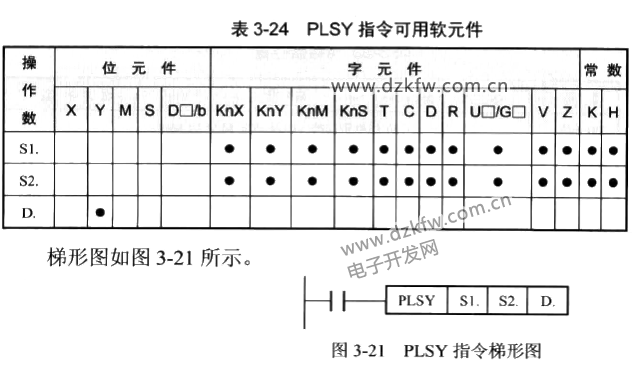
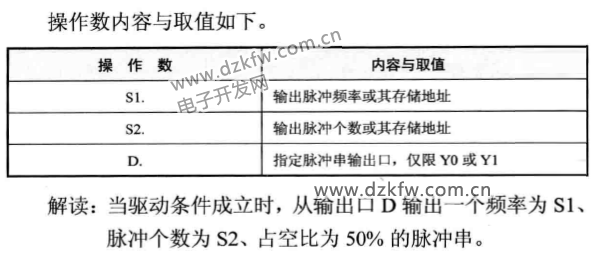
└²Ż║PLSY K5000 K10000 Y0ĪŻD0Ą─ųĄ╚ń╣¹į┌▀\(y©┤n)ąąĢr░l(f©Ī)╔·ūā╗»Ż¼ļŖÖC(j©®)▀\(y©┤n)ąą╦┘Č╚ę▓Ģ■ūā╗»Ż¼╝┤├}ø_Ņl┬╩╩Ū┐╔ęįīŹ(sh©¬)Ģrūā╗»Ą─ĪŻ╚ń╣¹├}ø_éĆöĄ(sh©┤)įO(sh©©)×ķ0Ż¼ät¤oŽ▐│ų└m(x©┤)▀\(y©┤n)ąąĪŻ
ūóęŌ▀@éĆųĖ┴ŅÄū║§ø]ėą╝ė£p╦┘Ż¼ī”ė┌▓Į▀M(j©¼n)ļŖÖC(j©®)üĒšfŻ¼┐╔─▄Ģ■įņ│╔╩¦▓ĮĪŻ
ČÓ╔┘éĆ├}ø_ļŖÖC(j©®)▐D(zhu©Żn)ę╗╚”─žŻ┐▀@Ė·ŠÄ┤aŲ„Ą─Ęų▒µ┬╩ėąĻP(gu©Īn)ĪŻÅ─╦┼Ę■“ī(q©▒)äėŲ„Ą─šf├„Ģ°ųą▓ķ┐┤ŠÄ┤aŲ„╩ŪČÓ╔┘ŠĆĄ─ĪŻ▒╚╚ń╩Ū2500ŠĆĄ─Ż¼ę╗░ŃŠÄ┤aŲ„Įø(j©®ng)▀^4ĘųŅlŻ¼╦∙ęį╩Ū2500x4=10000éĆ├}ø_▐D(zhu©Żn)ę╗╚”ĪŻ
├}ø_Ņl┬╩║═ļŖÖC(j©®)▐D(zhu©Żn)╦┘ėų╩Ū╩▓├┤ĻP(gu©Īn)ŽĄ─žŻ┐▒╚╚ńįO(sh©©)├}ø_Ņl┬╩×ķ10000Ż¼ęŌ╦╝╩Ū1├ļā╚(n©©i)░l(f©Ī)10000éĆ├}ø_ĪŻ10000éĆ├}ø_ļŖÖC(j©®)▐D(zhu©Żn)ę╗╚”Ż¼╦∙ęį╩Ū1├ļ▐D(zhu©Żn)ę╗╚”=60▐D(zhu©Żn)/ĘųńŖĪŻ▀@└’╩Ū╝┘įO(sh©©)ļŖūė²X▌å▒╚×ķ1ĪŻ╚ń╣¹▓╗×ķ1Ż¼▀Ćę¬│²ęįļŖūė²X▌å▒╚ĪŻ╦∙ęįļŖÖC(j©®)▐D(zhu©Żn)╦┘n(r/min) = ├}ø_Ņl┬╩(éĆ/sec)*60/(ŠÄ┤aŲ„Ęų▒µ┬╩*4*ļŖūė²X▌å▒╚)
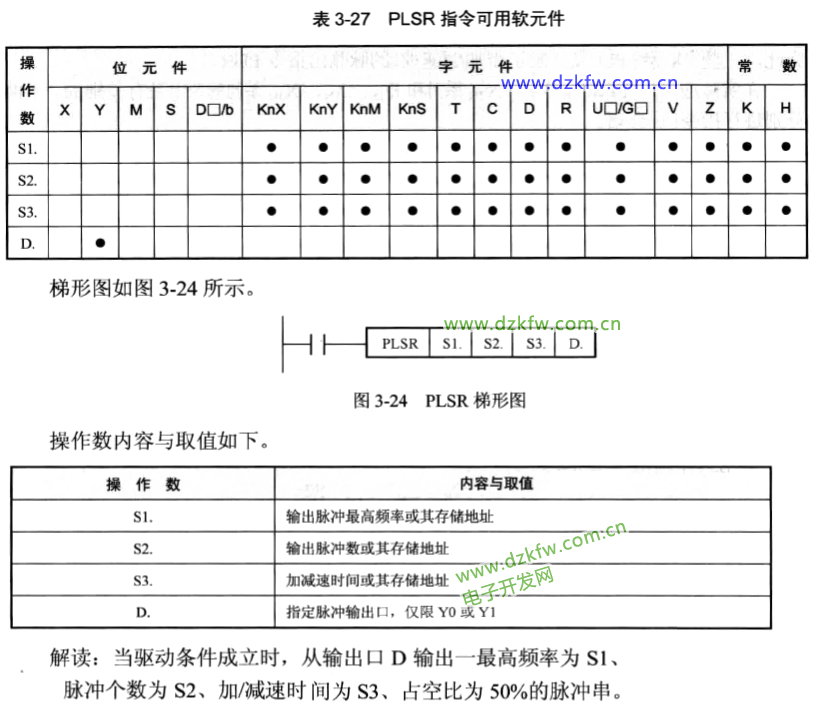
Ħ╝ė£p╦┘Ą─├}ø_▌ö│÷ųĖ┴Ņ(D)PLSRŻ║(D)PLSR + ├}ø_▌ö│÷ūŅĖ▀Ņl┬╩ + ├}ø_▌ö│÷éĆöĄ(sh©┤) + ╝ė£p╦┘Ģrķg + ├}ø_▌ö│÷┐┌
║¼┴xŻ║Puls-Reduction
▀@éĆĦ╝ė£p╦┘Ą─├}ø_▌ö│÷ųĖ┴Ņ┐╔ęį╩╣ļŖÖC(j©®)Ų▓Į║══Żų╣Ė³üĒĘĆ(w©¦n)Ż¼ė╚Ųõ▀m║Ž▓Į▀M(j©¼n)ļŖÖC(j©®)ĪŻ
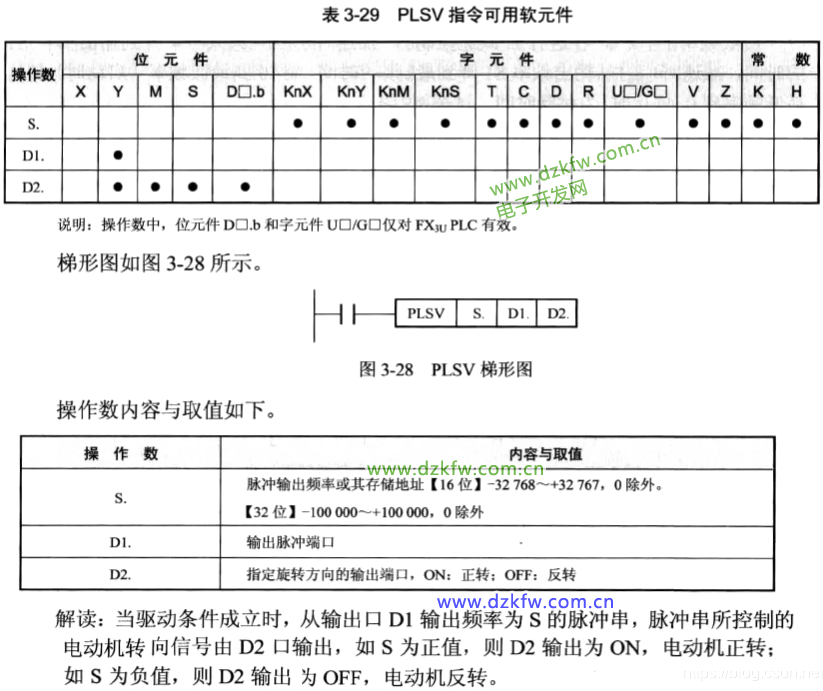
┐╔ūā╦┘Č╚├}ø_▌ö│÷ųĖ┴Ņ(D)PLSVŻ║(D)PLSV + ├}ø_Ņl┬╩ + ├}ø_▌ö│÷┐┌ + ĘĮŽ“Ż©╬╗į¬╝■Ż®
└²Ż║PLSV D1 Y0 Y3ĪŻø]ėą├}ø_éĆöĄ(sh©┤)ģóöĄ(sh©┤)Ż¼┐╔ęį│ų└m(x©┤)▀\(y©┤n)ąąŻ¼ėąĘĮŽ“ģóöĄ(sh©┤)ĪŻø]ėą╝ė£p╦┘Ż¼┐╔ęį▀B└m(x©┤)ūā╗»Ņl┬╩(PLSYę▓┐╔ęį▀BĮėūā╗»Ņl┬╩)ĪŻ│Żė├ė┌ČÓČ╬╦┘▀\(y©┤n)ąąŻ©┼cRAMPųĖ┴Ņ┼õ║Ž╩╣ė├Ż®ĪŻ
║¼┴x:Plus-variable
4ĪóPWMųĖ┴Ņ
PWM + ├}ø_īÆČ╚(ms) + ├}ø_ų▄Ų┌(ms) + ├}ø_▌ö│÷Č╦┐┌
║¼┴xŻ║Pulse Width Modulation.
┐╔ęįūįČ©┴xš╝┐š▒╚Ą─├}ø_▌ö│÷ųĖ┴ŅĪŻī”╦┼Ę■║═▓Į▀M(j©¼n)ļŖÖC(j©®)üĒšfŻ¼├}īÆöĄ(sh©┤)ō■(j©┤)¤oęŌ┴xŻ©ų╗ę¬▀_(d©ó)ĄĮūŅĄ═Ģrķgę¬Ū¾Ż®Ż¼ŽÓ«ö(d©Īng)ė┌ų╗ėą├}ø_Ņl┬╩Ą─ģóöĄ(sh©┤)Ą─├}ø_▌ö│÷ųĖ┴ŅĪŻī”ūāŅlŲ„Ż¼▓╗═¼Ą─š╝┐š▒╚┐╔ęįš{(di©żo)╣Ø(ji©”)ļŖÖC(j©®)Ą─▐D(zhu©Żn)╦┘ĪŻ
5ĪóįŁ³c(di©Żn)╗žÜwųĖ┴ŅZRN
║¼┴xŻ║Z-Return
ZRN + ╗žÜwķ_╩╝╦┘Č╚(HZ)ĪĪ+ĪĪ┼└ąą╦┘Č╚Ż©Ż╚Z)ĪĪ+ĪĪĮ³³c(di©Żn)ą┼╠¢ĪĪ+ĪĪ├}ø_▌ö│÷Č╦┐┌
▀@éĆųĖ┴Ņ▀mė├ė┌ĦėąÖC(j©®)ąĄō§ēKDOG║═ĄĮ╬╗ą┼╠¢Ż©Į³³c(di©Żn)ą┼╠¢Ż®Ą─ÖC(j©®)ąĄ┐žųŲĪŻķ_╩╝Ģręį╗žÜwķ_╩╝╦┘Č╚ųĖąąŻ¼ų▒ĄĮĮ³³c(di©Żn)ą┼╠¢ėąą¦Ż¼░┤┼└ąą╦┘Č╚▀\(y©┤n)ąąŻ¼«ö(d©Īng)Į³³c(di©Żn)ą┼╠¢¤oą¦ĢrŻ¼═Żų╣▀\(y©┤n)ąąĪŻ═Żų╣▀\(y©┤n)ąą║¾«ö(d©Īng)Ū░ųĄ╝─┤µŲ„Ż─8140ĪóD8141öĄ(sh©┤)ųĄÜw┴ŃĪŻ
6ĪóŽÓī”Č©╬╗ųĖ┴Ņ(D)DRVI
DRVIĪĪ+ĪĪ├}ø_éĆöĄ(sh©┤)ĪĪ+ĪĪ├}ø_Ņl┬╩ĪĪ+ĪĪ├}ø_▌ö│÷┐┌ĪĪ+ĪĪĘĮŽ“▌ö│÷ą┼╠¢
▀@éĆųĖ┴ŅŅÉ╦Ų├}ø_▌ö│÷ųĖ┴ŅPLSYĪŻ▓╗═¼³c(di©Żn)╩Ū├}ø_éĆöĄ(sh©┤)┐╔ęįųĖČ©×ķš²╗“žō(f©┤)Ż¼┤·▒Ē▓╗═¼ĘĮŽ“ĪŻ═¼ĢrėąĘĮŽ“ą┼╠¢▌ö│÷ĪŻ┤¾Ė┼╩Ū×ķ┴╦┼cPLSYģ^(q©▒)Ęų░╔Ż¼░č├}ø_éĆöĄ(sh©┤)║═├}ø_Ņl┬╩ģóöĄ(sh©┤)š{(di©żo)ōQ┴╦╬╗ų├ĪŻ
7ĪóĮ^ī”Č©╬╗ųĖ┴Ņ(D)DRVA
║¼┴xŻ║Drive-Absolutely
(D)DRVA + ├}ø_éĆöĄ(sh©┤)ĪĪ+ĪĪ├}ø_Ņl┬╩ĪĪ+ĪĪ├}ø_▌ö│÷┐┌ĪĪ+ĪĪĘĮŽ“▌ö│÷ą┼╠¢
ęŲäėĄĮųĖČ©ŽÓī”įŁ³c(di©Żn)Ą─Į^ī”╬╗ų├ĪŻ╦∙ų^įŁ³c(di©Żn)Ż¼Š═╩ŪD8140ĪóD8141«ö(d©Īng)Ū░ųĄ╝─┤µŲ„ųĄ×ķ0Ą─╬╗ų├ĪŻĘĮŽ“╩Ūęį├}ø_éĆöĄ(sh©┤)║═«ö(d©Īng)Ū░ųĄ╝─┤µŲ„Ą─«ö(d©Īng)Ū░ųĄ▒╚▌^Č°Č©ĪŻĪĪ
ŻĖĪóųąöÓČ©ķL╬╗ų├ųĖ┴ŅDVIT
║¼┴xŻ║Drive-Interrupt
DVIT + ųąöÓ║¾▌ö│÷Ą─ŽÓī”├}ø_éĆöĄ(sh©┤)ĪĪ+ĪĪ├}ø_Ņl┬╩ĪĪ+ĪĪ├}ø_▌ö│÷┐┌ĪĪ+ĪĪĘĮŽ“▌ö│÷ą┼╠¢
│ų└m(x©┤)▀\(y©┤n)ąąŻ¼ų▒ų┴ė÷ĄĮųąöÓą┼╠¢║¾Ż¼į┘▀\(y©┤n)ąąųĖČ©Ą─├}ø_éĆöĄ(sh©┤)║¾═Żų╣ĪŻųąöÓą┼╠¢ė╔ŽĄĮy(t©»ng)─¼šJ(r©©n)╗“┐╔▀xĪŻ╚ńM8336×ķOFF,Y0Ą──¼šJ(r©©n)ųąöÓą┼╠¢Č╦┐┌╩ŪX0,Y1─¼šJ(r©©n)╩ŪX1Ż╗╚¶M8336×ķON,┐╔ęįųĖČ©ųąöÓČ╦┐┌ĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū