
Į±╠ņĮo┤¾╝ęĘųŽĒę╗Ų¬ā╔▌SČ©╬╗░Ė└²Ęų╬÷
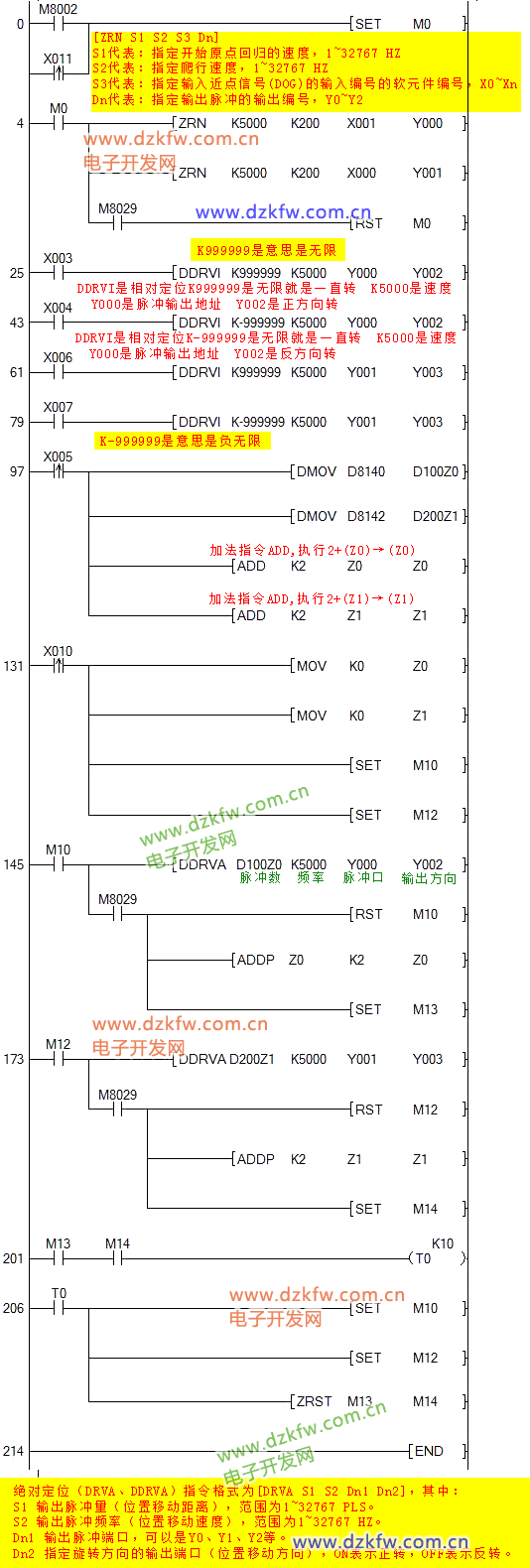
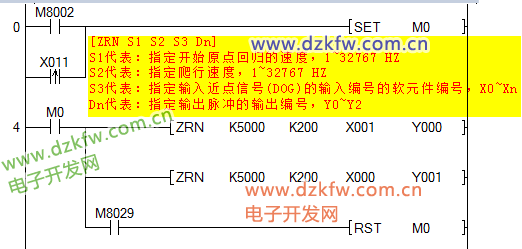
ūóęŌŻ║┤╦│╠ą“ĘŪ═Ļš¹▀\(y©┤n)ąą│╠ą“Ż¼ų„ę¬╩ŪŽļūī┤¾╝ę└ĒĮŌČ©╬╗ųĖ┴Ņ┼õ║ŽūāųĘ╣Ø(ji©”)╝s│╠ą“▓ĮŻ¼║å(ji©Żn)╗»│╠ą“ā╚(n©©i)╚▌ė├ĪŻŪęā╔▌S╩Ūį┌═¼Ģr(sh©¬)▀\(y©┤n)ąąŻ¼╚ń╩Ū╩«ūų╗¼┼_(t©ói)Ż¼šł(q©½ng)?ji©Īn)O(sh©©)Č©ā╔▌SŽÓ═¼Ņl┬╩├}ø_▌ö│÷.
ķ_(k©Īi)ÖC(j©®)│§╩╝╗»╗žįŁ³c(di©Żn)▓┐Ęų
-
╩╣ė├ķ_(k©Īi)ÖC(j©®)├}ø_ĪŠM8002Ī┐║══Ō▓┐▌ö╚ļė|³c(di©Żn)ĪŠX11Ī┐Ą─├}ø_ą┼╠¢(h©żo)üĒ(l©ói)ų├╬╗ĪŠM0Ī┐Ż¼▒Ż│ųūĪķ_(k©Īi)ÖC(j©®)ą┼╠¢(h©żo)╗“╗žįŁ³c(di©Żn)ą┼╠¢(h©żo)Ż╗
-
į┘╩╣ė├ĪŠM0Ī┐Ą─│Żķ_(k©Īi)ė|³c(di©Żn)“ī(q©▒)äė(d©░ng)ĪŠZRNĪ┐įŁ³c(di©Żn)╗žÜwųĖ┴ŅŻ╗
-
ŲõųąK5000▒Ē╩Š╗žÜwĄ─╦┘Č╚×ķ5000HZŻ¼K200▒Ē╩Š┼└ąą╦┘Č╚Ż¼«ö(d©Īng)X1╗“X0ė|³c(di©Żn)Įė═©Ģr(sh©¬)Ż¼╝┤ķ_(k©Īi)╩╝ęį┼└ąą╦┘Č╚╗žįŁ³c(di©Żn)ĪŻ
-
ĪŠM8029Ī┐├}ø_ĮY(ji©”)╩°ś╦(bi©Īo)ųŠ╬╗Ż¼«ö(d©Īng)ĪŠY0Ī┐║═ĪŠY1Ī┐├}ø_┐┌▓╗į┘░l(f©Ī)╦═├}ø_Ż¼Š═Å═(f©┤)╬╗Ą¶ĪŠM0Ī┐Ż¼ęį▒ŃŽ┬┤╬“ī(q©▒)äė(d©░ng)įŁ³c(di©Żn)╗žÜwųĖ┴ŅĪŻ
³c(di©Żn)╬╗▓╔╝»▓┐Ęų
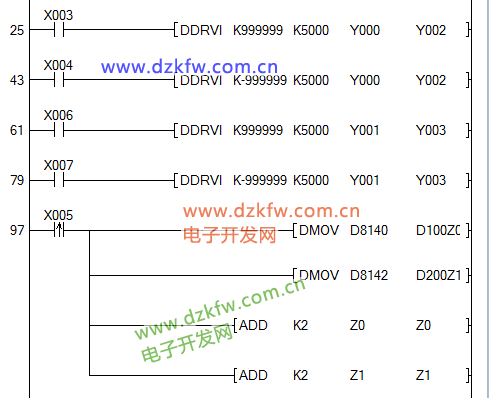
1.╩╣ė├═Ō▓┐│Żķ_(k©Īi)▌ö╚ļė|³c(di©Żn)ĪŠx3Ī┐ĪŠx4Ī┐ĪŠx6Ī┐ĪŠx7Ī┐“ī(q©▒)äė(d©░ng)ĪŠDDRVIĪ┐32╬╗ŽÓī”(du©¼)Č©╬╗ųĖ┴ŅŻ¼▀_(d©ó)ĄĮ▌SĄ─š²Ę┤ĘĮŽ“▀\(y©┤n)ąą─┐Ą─Ż¼ŲõųąĪŠK999999Ī┐▒Ē╩Šš²Ž“▀\(y©┤n)ąąŻ¼ĪŠK-999999Ī┐▒Ē╩ŠĘ┤Ž“▀\(y©┤n)ąąŻ¼öĄ(sh©┤)ųĄŠ∙░l(f©Ī)╦═Ą─├}ø_öĄ(sh©┤)Ż¼K999999▒Ē╩Š¤o(w©▓)öĄ(sh©┤)├}ø_ĪŻ
2.╩╣ė├═Ō▓┐▌ö╚ļė|³c(di©Żn)ĪŠX5Ī┐Ą─├}ø_ą┼╠¢(h©żo)Ż¼└¹ė├ĪŠDMOVĪ┐32╬╗é„╦═ųĖ┴Ņ░čĪŠY0Ī┐├}ø_▌ö│÷┐éöĄ(sh©┤)╝─┤µŲ„ĪŠD8141ĪóD8140Ī┐║═ĪŠY1Ī┐├}ø_▌ö│÷┐éöĄ(sh©┤)╝─┤µŲ„ĪŠD8143ĪóD8142Ī┐Ą─«ö(d©Īng)Ū░├}ø_öĄ(sh©┤)é„╦═ĮoĪŠD100Z0Ī┐ĪŠD200Z1Ī┐ĪŻ═¼Ģr(sh©¬)╩╣ė├ĪŠADDĪ┐╝ėĘ©ųĖ┴Ņ░čūāųĘ╝─┤µŲ„ĪŠZ0ĪóZ1Ī┐Ą─ųĄ▓╗öÓ╝ėĪŠ2Ī┐Ż¼īŹ(sh©¬)¼F(xi©żn)░č▓╗═¼³c(di©Żn)╬╗╦∙ąĶ├}ø_öĄ(sh©┤)ųĄ┤µĘ┼Įo▓╗═¼Ą─╝─┤µŲ„
3.ūóęŌŻ║├┐░┤ę╗┤╬░┤ŌoŻ¼Š═┤·▒Ē┤µā”(ch©│)ę╗éĆ(g©©)³c(di©Żn)Ą─öĄ(sh©┤)ųĄŻ¼╣╠Č©Ą─┐“╝▄ā╚(n©©i)Ż¼įŁ³c(di©Żn)ĄĮ├┐┤╬░┤░┤ŌoĄ─├}ø_öĄ(sh©┤)Ż¼ė╔ĪŠD8141ĪóD8140Ī┐ĪŠD8143ĪóD8142Ī┐╠ß╣®ĪŻ
ā╔▌S▀\(y©┤n)ąą▓┐Ęų
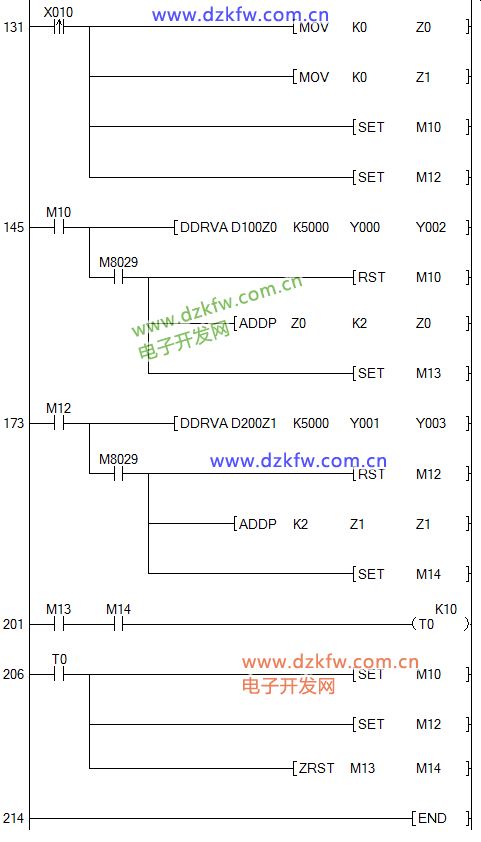
1.╩╣ė├═Ō▓┐▌ö╚ļė|³c(di©Żn)ĪŠX10Ī┐Ą─├}ø_ą┼╠¢(h©żo)“ī(q©▒)äė(d©░ng)ĪŠMOVĪ┐é„╦═ųĖ┴Ņ░čūāųĘ╝─┤µŲ„ĪŠZ0ĪóZ1Ī┐Ą─öĄ(sh©┤)ųĄŪÕ┴ŃŻ¼═¼Ģr(sh©¬)“ī(q©▒)äė(d©░ng)ĪŠDDRVAĪ┐Į^ī”(du©¼)Č©╬╗ųĖ┴ŅĪŻŲõųąĪŠD100Z0Ī┐ĪŠD200z1Ī┐×ķ╔Ž├µ▓╔╝»ĄĮĄ─├}ø_öĄ(sh©┤)Ż¼K5000▒Ē╩Šā╔▌S╩╣ė├═¼ę╗Ņl┬╩░l(f©Ī)╦═├}ø_Ż╗
2.╩╣ė├ĪŠM8029Ī┐├}ø_ĮY(ji©”)╩°ś╦(bi©Īo)ųŠ╬╗Ż¼├}ø_░l(f©Ī)╦══Ļ│╔Å═(f©┤)╬╗ĪŠM10Ī┐ĪŠM12Ī┐Ż¼╩╣ā╔▌S═Żų╣Ż¼═¼Ģr(sh©¬)“ī(q©▒)äė(d©░ng)ĪŠADDĪ┐╝ėĘ©ųĖ┴ŅĖ─ūāūāųĘ╝─┤µŲ„ĪŠZ0ĪóZ1Ī┐Ą─öĄ(sh©┤)ųĄŻ¼Å─Č°īŹ(sh©¬)¼F(xi©żn)Ž┬ę╗┤╬▀\(y©┤n)ąąĢr(sh©¬)├}ø_öĄ(sh©┤)Ą─Ė─ūāŻ╗
3.ų├╬╗ĪŠM13ĪóM14Ī┐▒Ē╩Šā╔▌SČ╝═Żų╣Ą─Ģr(sh©¬)║“Ż¼“ī(q©▒)äė(d©░ng)ę╗éĆ(g©©)Č©Ģr(sh©¬)Ų„ĪŠT0Ī┐Ż¼═Żų╣ę╗├ļŻ¼ę╗├ļ║¾ųžą┬“ī(q©▒)äė(d©░ng)Č©╬╗ųĖ┴ŅĪŻ
ūóęŌŻ║┤╦╠Äā╔▌SČ╝═Żų╣║¾Ż¼┐╔ęįīŹ(sh©¬)¼F(xi©żn)└²╚ńŻ║Ų„▓─ŪąĖŅĪóŃ@┐ūĪó╗“š▀ŖA╬’Ę┼╬’Ą╚ā╚(n©©i)╚▌Ż¼│╠ą“ąĶūį╝║ŠÄīæ(xi©¦)╠Ē╝ėĪŻ
ļŖūėķ_(k©Īi)░l(f©Ī)ŠW(w©Żng)Ż¼ę╗éĆ(g©©)ļŖūė╝╝ąg(sh©┤)║═╣ż┐žŠW(w©Żng)šŠĪŻįu(p©¬ng)šō╠Ä┤¾╝ę┐╔ęįča(b©│)│õ╬─š┬ĮŌßī▓╗ī”(du©¼)╗“ŪĘ╚▒Ą─▓┐ĘųŻ¼▀@śėŽ┬ę╗éĆ(g©©)┐┤ĄĮĄ─╚╦Ģ■(hu©¼)īW(xu©”)ĄĮĖ³ČÓŻ¼─Ńų¬Ą└Ą─š²╩Ū┤¾╝ęąĶꬥ─ĪŻĪŻĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō(y©©)├µ
╦óą┬Ēō(y©©)├µ Ž┬ĄĮĒō(y©©)Ąū
Ž┬ĄĮĒō(y©©)Ąū