
1Īó╩▓├┤╩Ū▀\äė┐žųŲ
▀\äė┐žųŲŻ¼ę▓┐╔Įąū÷ļŖ┴”═Žäė┐žųŲŻ╗╦³╩Ūūįäė╗»Ą─ę╗éĆĘųų¦Ż¼Ųõäė┴”į┤┤¾▓┐ĘųČ╝╗∙ė┌ļŖäėÖCĪŻ
ę▓Š═╩ŪšfŻ¼▀\äė┐žųŲŲõīŹ╩Ū╗∙ė┌ļŖäėÖCŻ¼īŹ¼F╬’¾wī”ė┌ĮŪ╬╗ęŲĪó╦┘Č╚Īó▐DŠžĄ╚╬’└Ē┴┐Ė─ūāĄ─┐žųŲĪŻ
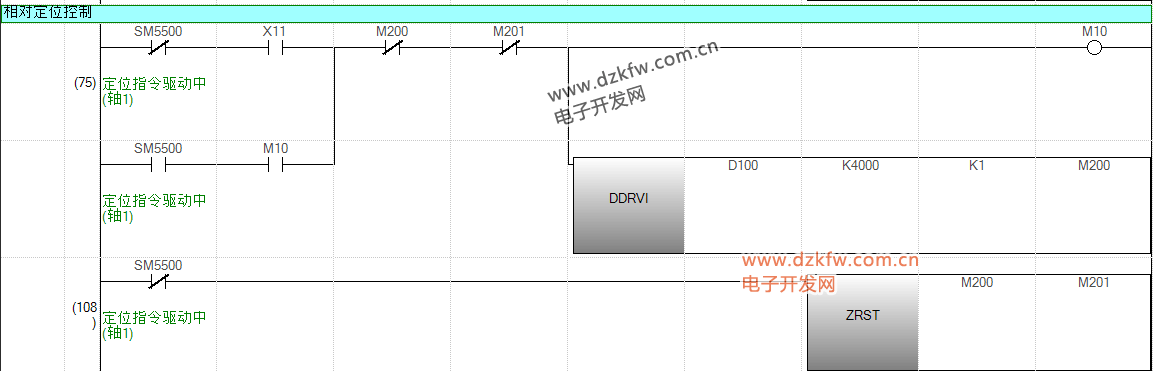
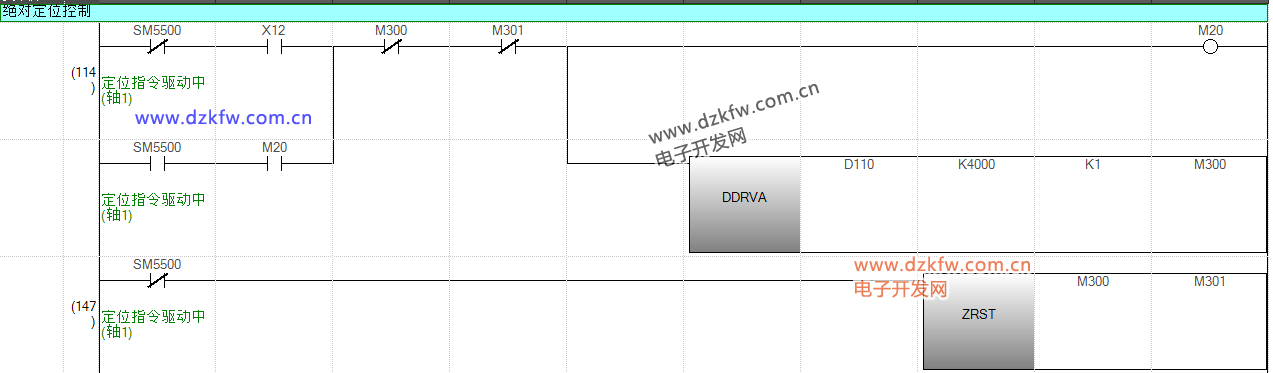
▀@└’├µŻ¼ėųīó▀\äė┐žųŲ▀MąąäØĘų×ķā╔éĆĘĮŽ“Ż¼ę╗éĆ╩Ūė├ė┌ÖCąĄąąśIĄ─▀\äė┐žųŲŻ¼┴Ēę╗éĆ╩Ūė├ė┌╗»╣żąąśIĄ─▀^│╠┐žųŲĪŻ
į┌╔Ž├µ╠ߥĮŻ¼▀\äė┐žųŲŲõīŹ╩Ū╗∙ė┌ļŖäėÖCĄ─Ż¼▀@└’Ą─ļŖäėÖCųĖĄ─╩Ū╦┼Ę■ļŖÖCŻ╗
╚ń╣¹ę╗╠ūå╬ÖCįOéõ╔Žų╗ė├┴╦ę╗┼_╦┼Ę■ļŖÖCŻ¼▀@ĘNŪķørŽ┬╩ŪĖ³ūóųžė┌ī”ļŖÖCĄ─ę╗éĆ┐žųŲŻ¼╚ń╬╗ų├Īó╦┘Č╚Īó▐DŠžĄ─┐žųŲŻ╗▀@éĆ└²ūėŻ¼╩ŪŽļå╬┼_ļŖÖC┐žųŲų╗╩Ū▀\äė┐žųŲĄ─ę╗éĆŁh╣ØĪŻ
Č°▀\äė┐žųŲų„ę¬╩Ūßśī”«aŲĘŻ¼š¹¾w░³║¼ÖCąĄŻ©ļŖäėÖCų╗╩ŪÖCąĄųąĄ─┴Ń┼õ╝■Ż®ĪóļŖÜŌĪó▄ø╝■Ą╚Ż¼╩Ūī”ÖCąĄ▀\äė▓┐╝■Ą─╬╗ų├Īó╦┘Č╚Ą╚▀MąąīŹĢrĄ─┐žųŲ╣▄└ĒŻ¼╩╣Ųõ░┤ššŅAČ©Ą─┐žųŲĘĮ░Ė▐Dūā×ķŲ┌═¹Ą─ÖCąĄ▀\äėĄ─┐žųŲĪŻ
2Īó▀\äė┐žųŲæ¬ė├Ą─ł÷Š░
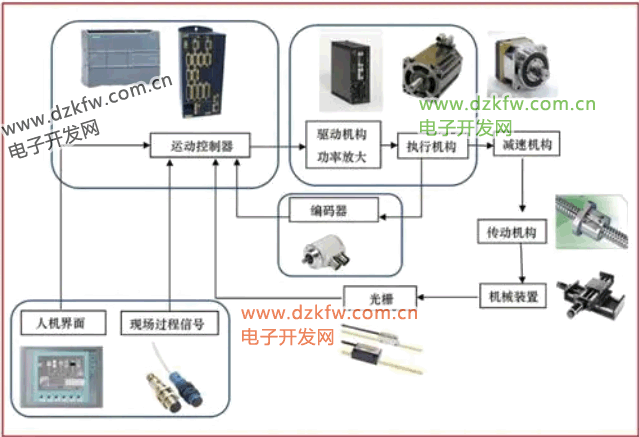
▀\äė┐žųŲŽĄĮy╩ŪęįÖCąĄ▀\äėĄ─“īäėįOéõĪ¬Ī¬ļŖäėÖC×ķ┐žųŲī”Ž¾Ż¼ęį┐žųŲŲ„×ķ║╦ą─Ż¼ęįļŖ┴”ļŖūė╣”┬╩ūāōQčbų├×ķł╠ąąÖCśŗĮM│╔Ą─ĪŻ│ŻęŖĄ─╚ńļŖäėÖCĪóūāŅlčbų├║═┐žųŲŲ„╚²▓┐ĘųĮM│╔é„äėÖCśŗĪŻ
ī”ÖCąĄ▀\äė▓┐╝■Ą─╬╗ų├Īó╦┘Č╚Ą╚▀MąąīŹĢrĄ─┐žųŲ╣▄└ĒŻ¼╩╣Ųõ░┤ššŅAČ╚Ų┌Ą─▀\äė▄ē█E║═ęÄČ©Ą─▀\äėģóöĄ▀Mąą▀\äėĪŻ╦∙ęįŻ¼╔·«aÖCąĄĪó▀\▌öÖCąĄĄ╚╔·«aŅIė“Š∙ėą╩«Ęųųžę¬Ą─æ¬ė├ārųĄĪŻ
2.1 š{╦┘æ¬ė├
’LÖCĪó▒├ŅÉÖCąĄ×ķ┴╦╣Ø─▄Ż¼ę¬Ė∙ō■žō▌d▌pųž▀Mąąš{╦┘Ż╗ÖC┤▓╝ė╣żŻ¼ę¬Ė∙ō■╣ż╝■Š½Č╚Ą─▓╗═¼ę¬Ū¾▀Mąąš{╦┘Ż╗▀\▌öÖCąĄ×ķ┴╦╠ßĖ▀╔·«a┬╩ąĶę¬▀Mąąš{╦┘Ż╗ļŖ╠▌×ķ┴╦╠ßĖ▀╩µ▀mČ╚ę▓ąĶę¬▀Mąąš{╦┘ĪŻ

2.2 ╦┼Ę■ŽĄĮyæ¬ė├
╗∙ė┌ļŖäėÖCĄ─┐žųŲŻ¼ęįīŹ¼F╬’¾wī”ĮŪ╬╗ęŲĪó▐DŠžĪó▐D╦┘Ą╚╬’└Ē┴┐Ė─ūāĄ─┐žųŲĪŻ▓╗═¼ė┌å╬╝āĄ─ļŖÖC┐žųŲŻ¼▀\äė┐žųŲĻPūó³cį┌ė┌ģfš{ČÓéĆļŖÖCŻ¼═Ļ│╔ųĖČ©Ą─▀\äėŻ¼ė╚Ųõė├ė┌Š½┤_Č©╬╗Ą─ł÷║ŽĪŻ

2.3 ųŪ─▄é}Äņ
1Īó▓╦°B¤o╚╦é}Äņ
ā╔ĘųńŖ┐┤Č«▓╦°BųŪ─▄é}Äņ┴„│╠ www.bilibili.com/video/BV1sK4y1k7h1/
2Ī󊮢|¤o╚╦é}┼õųŪ─▄ĘųÆ■ŽĄĮy
=3Īó▀\äė┐žųŲŽĄĮyĄ─ĮM│╔
▀\äė┐žųŲŲ„Ż║│ŻęŖĄ─Š═╩Ūplc└▓Ż╗
“īäėŲ„Ż║╣ż┐ž╚╦ī”“īäėŲ„æ¬įōį┘╩ņŽż▓╗▀^┴╦Ż╗
ł╠ąąÖCśŗŻ║╦┼Ę■ļŖÖCŻ╗
£p╦┘ÖCśŗŻ║£p╦┘Ų„Ż╗
╣Ō¢┼Ż║ŠÄ┤aŲ„Ą─ę╗ĘNŻ╗Ż©ę╗░Ńė├ė┌▄ć┤▓╝ė╣żŻ®
╚╦ÖCĮń├µŻ║┤¾╝ę╩ņŽżĄ─ė|├■Ų┴ĪŻ
ł╠ąą┴„│╠: ė╔▀\äė┐žųŲŲ„░l│÷├³┴ŅŻ¼Įo“īäėÖCśŗ▀Mąą╣”┬╩Ę┼┤¾Ż¼īóĘ┼┤¾║¾Ą─ą┼╠¢é„Įoł╠ąąÖCśŗŻ©╦┼Ę■ļŖÖCŻ®Ż¼╦┼Ę■ļŖÖCūįĦŠÄ┤aŲ„Ż¼─▄ē“īŹ¼F**░ļķ]Łh┐žųŲ**Ż╗╦┼Ę■ļŖÖCė╔é„äėÖCśŗ┐žųŲÖCąĄŻ¼į┌ÖCąĄčbų├╔Ž░▓čb┴╦╣Ō¢┼│▀Ż©ę▓╩ŪŠÄ┤aŲ„Ż®Ż¼īŹ¼F**╚½ķ]Łh┐žųŲ**ĪŻ▓┘ū„╚╦åTį┌¼Fł÷┐╔═©▀^╚╦ÖCĮń├µ╚ź▀Mąąš¹éĆŁh╣ØĄ─**š{įć▓┘ū„**ĪŻ
4Īó╚²┴ŌPLCķ_░l▀\äė┐žųŲąĶĄ─ŁhŠ│
-
ę╗éĆPLC╗“š▀▀\äė░Õ┐© Ż©220VŻ®
-
ę╗éĆDC 24Vķ_ĻPļŖį┤ Ż©▓Į▀MļŖÖC╩╣ė├å╬¬ÜļŖį┤äe║═PLCė├═¼ę╗éĆŻ®
- ę╗éĆ▓Į▀M“īäėŲ„
- ę╗éĆ▓Į▀MļŖÖC (1.8ĪŃ)
- ĮzŚU┬▌ŠÓ4mmŠÓļx
░č├}ø_▐DōQ×ķŠÓļx

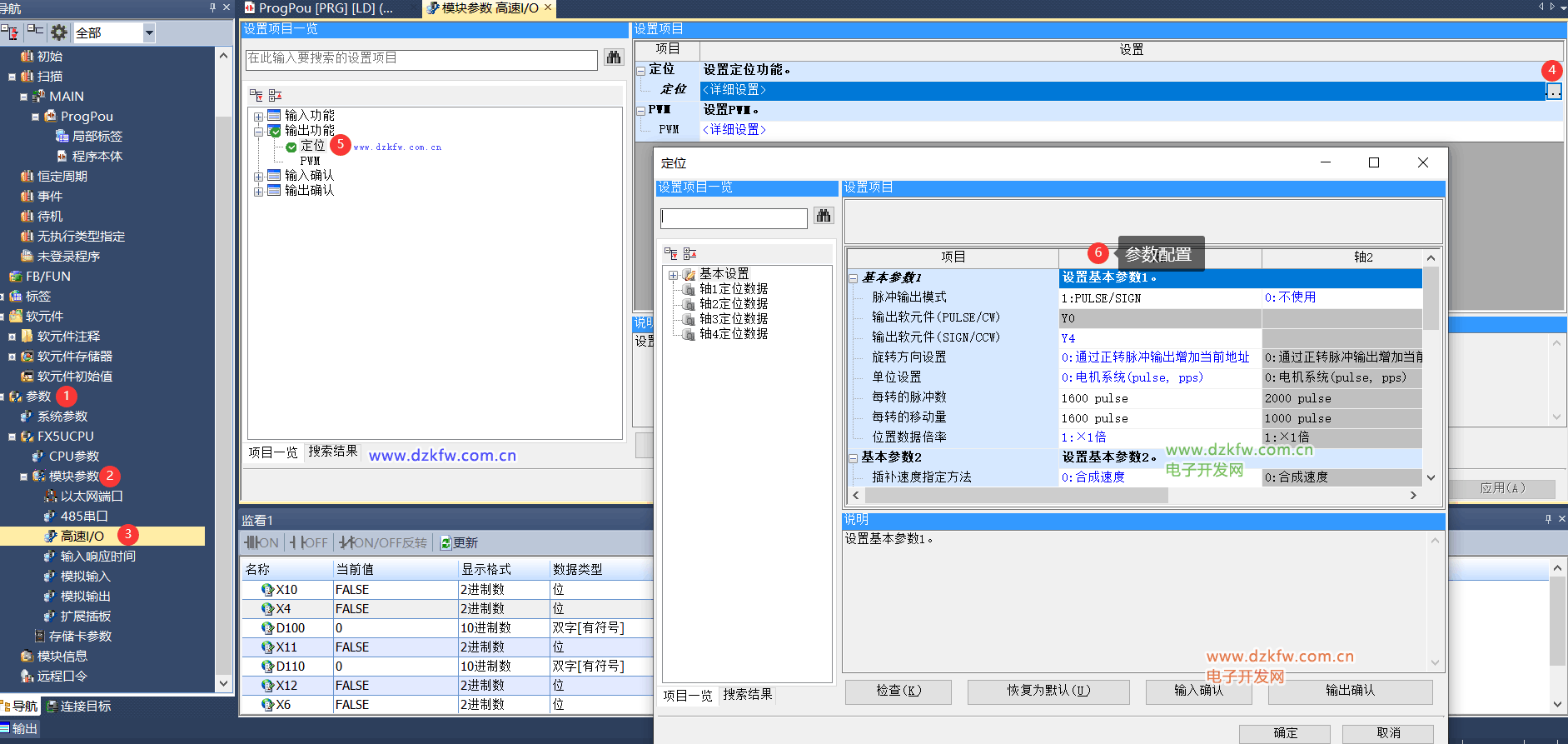
5ĪóGXWork3╣żŠ▀╩╣ė├
5.1 ┼õų├ŠWĮj
5.2 £yįć╩Ūʱ─▄š²│Ż═©ą┼
PLCData.PLC = new Mitsubishi.McProtocolTcp("192.168.9.200", 6000, Mitsubishi.McFrame.MC3E);
await PLCData.PLC.Open();
PLCData<int> ints = new PLCData<int>(Mitsubishi.PlcDeviceType.X, 0, 1);
await Task.Run(async () =>
{
while(true)
{
await ints.ReadData();
Console.WriteLine($"ints[0]={ints[0]}");
Thread.Sleep(2000);
}
});
Console.ReadKey();
5.3 ┼õų├╚²┴ŌĖ▀╦┘IO
6Īó╚²┴ŌPLC▀\äė┐žųŲ╬─Ön▓ķķå
6.1 ╬─ÖnŽ┬▌d
6.2 Č©╬╗Ų¬ā╚╚▌ĮķĮB
6.2.1 ÖCąĄįŁ³c╗žÜw
6.2.2 ŽÓī”Č©╬╗
6.2.3 Į^ī”Č©╬╗
6.2.4 ╚²┴Ō╠ž╩Ō└^ļŖŲ„▒ĒĖ±

7ĪóŠÄīæ╠▌ą╬łD
╠▌ą╬łD│Żė├┐ņĮ▌ųĖ┴Ņ
ldi │Żķ]ė|³c
ld │Żķ_ė|³c
out ▌ö│÷ŠĆ╚”
7.0 Ž▐╬╗ķ_░l
7.1 įŁ³c╗žÜwŠÄīæ
7.2 ŽÓī”Č©╬╗
7.3 Į^ī”Č©╬╗
8Īó╔Ž╬╗ÖC═©ėŹ┼c▄øį¬╝■ūxīæ▓┘ū„
- ³c╬╗öĄō■▒ĒŠÄīæ┼c▓ķįā
- ╗∙ė┌Įń├µīŹ¼FįŁ³c╗žÜw
- īŹ¼FŽÓī”Č©╬╗║═š²▐D║═Ę┤▐D
- īŹ¼FĮ^ī”Č©╬╗
- īŹ¼F╝▒═Ż╣”─▄
- īŹ¼FČ©╬╗┐žųŲ╣”─▄
- īŹ¼F╦┘Č╚┐žųŲ
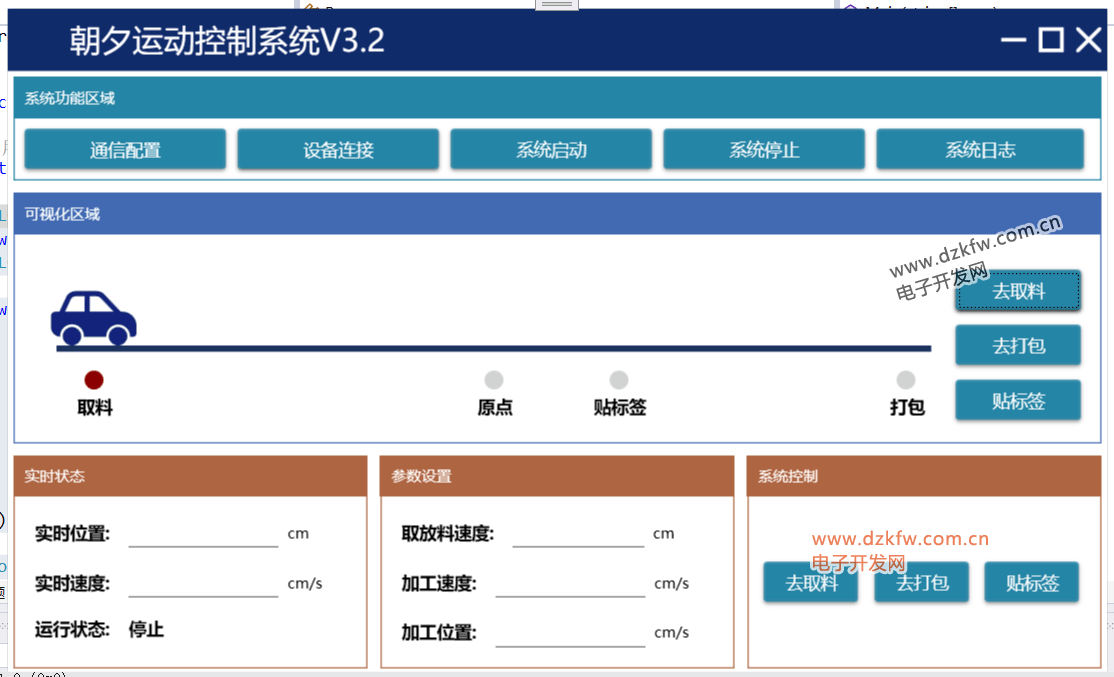
9Īó│»Ž”▀\äė┐žųŲŽĄĮyĮń├µįOėŗ
10Īó▀\äė┐žųŲŽĄĮy┼c╚²┴ŌPLCī”Įė═Ļ│╔öĄō■═¼▓Į
╩▓├┤╩Ū“īäėŲ„Ą─╝ÜĘųŻ┐▀\ąą┼─öĄ┼c▓ĮŠÓĮŪ╩Ū╩▓├┤ĻPŽĄŻ┐
Ī░╝ÜĘųĪ▒╩Ūßśī”Ī░▓ĮŠÓĮŪĪ▒Č°čįĄ─ĪŻø]ėą╝ÜĘųĀŅæBŻ¼┐žųŲŽĄĮy├┐░lę╗éĆ▓Į▀M├}ø_ą┼╠¢Ż¼▓Į▀MļŖÖCŠ═░┤ššš¹▓Įą²▐Dę╗éĆ╠žČ©Ą─ĮŪČ╚ĪŻ▓Į▀MļŖÖCĄ─ģóöĄŻ¼Č╝Ģ■Įo│÷ę╗éĆ▓ĮŠÓĮŪĄ─ųĄĪŻ╚ń110BYG250Aą═ļŖÖCĮo│÷Ą─ųĄ×ķ0.9ĪŃ/1.8ĪŃŻ©▒Ē╩Š░ļ▓Į╣żū„Ģr×ķ0.9ĪŃĪóš¹▓Į╣żū„Ģr×ķ1.8ĪŃŻ®Ż¼▀@╩Ū▓Į▀MļŖÖC╣╠ėą▓ĮŠÓĮŪĪŻ═©▀^▓Į▀MļŖÖC“īäėŲ„įOų├Ą─╝ÜĘųĀŅæBŻ¼▓Į▀MļŖÖCīóĢ■░┤šš╝ÜĘųĄ─▓ĮŠÓĮŪą²▐D╬╗ęŲĮŪČ╚Ż¼Å─Č°īŹ¼FĖ³×ķŠ½├▄Ą─Č©╬╗ĪŻęį110BYG250AļŖÖC×ķ└²Ż¼┴ą▒Ēšf├„Ż║
ļŖÖC╣╠ėą▓ĮŠÓĮŪ ▀\ąą┼─öĄ ╝ÜĘųöĄ ļŖÖC▀\ąąĢrĄ─šµš²▓ĮŠÓĮŪ
0.9ĪŃ/1.8ĪŃ 8 2╝ÜĘųŻ¼╝┤░ļ▓ĮĀŅæB 0.9ĪŃ
0.9ĪŃ/1.8ĪŃ 20 5╝ÜĘųĀŅæB 0.36ĪŃ
0.9ĪŃ/1.8ĪŃ 40 10╝ÜĘųĀŅæB 0.18ĪŃ
0.9ĪŃ/1.8ĪŃ 80 20╝ÜĘųĀŅæB 0.09ĪŃ
0.9ĪŃ/1.8ĪŃ 160 40╝ÜĘųĀŅæB 0.045ĪŃ
11Īó▀\äė┐žųŲŽĄĮyŲõ╦¹╣”─▄═Ļ╔Ų┼cš{įć
1600éĆ├}ø_ 4mm
1mm = 400éĆ├}ø_
cm║═Ž±╦žūā╗»Ż¼╦³éāČ╝╩ŪŠĆąįĄ─ūā╗»┴┐
y=kx+b
x: ąĪ▄ćīŹļH╬╗ų├Ż¼å╬╬╗cm
y: ąĪ▄ćį┌▄ø╝■╔ŽĄ─╬╗ų├ū°ś╦Ż¼å╬╬╗px
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū