
PWM如何控制直流電機
智能車基礎可是控制電機呀!如何設置頻率,如何控制車的加速,減速,正反轉狀態~。是這篇文章要弄明白的
直流電機

對于普通的直流(有刷)電機,在其兩個電極上接上合適的直流電源后,電機就可以滿速轉動,電源反接后,電機就反向轉動。實際情況是我們要能控制電機的正反轉,停止等狀態以及電機的轉速。
直流電機正反轉及停止狀態直流有刷電機是內含電刷裝置的將直流電能轉換成機械能(直流電動機)或將機械能轉換成直流電能(直流發電機)的旋轉電機。區別于直流無刷電機,電刷裝置是用來引入或引出直流電壓和直流電流的。
當單片機輸出高電平時,電機得電,從而滿速運行;當單片機輸出低電平時,電機兩端沒有電壓,電機停止轉動。
那如何使電機兩端的電壓發生變化,進而控制電機的轉速呢?只要單片機輸出占空比可調的方波,即PWM信號即可控制電機兩端的電壓發生變化,從而實現電機轉速的控制。
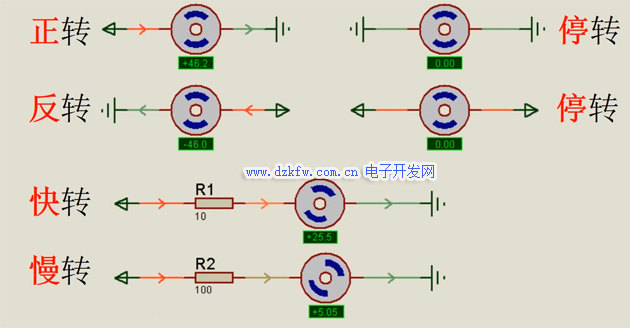
VCC(1)→信號1→電機→信號2→GND(0),實現了電機的正轉。
GND(0)→信號1→電機→信號2→VCC(1),實現了電機的反轉。
GND(0)→電機→ GND(0),停轉
VCC(1)→電機→ VCC(1),停轉
阻值小(PWM占空比大,平均電壓大),轉的快
阻值大(PWM占空比小,平均電壓小),轉的慢
PS:0和1代表低電平和高電平,PWM后面詳細說明。
可以通過改變電壓來控制電機速度。
例如使用12V直流電機時候,給12V的電就滿速轉,給5V的電就是5/12的速度轉
只要單片機輸出占空比可調的方波,即PWM信號即可控制電機兩端的電壓發生變化,從而實現電機轉速的控制。
PWMPWM輸出的信號可以看成電壓,而不是實際的電壓,要注意!!
上面說了,我們會用PWM調速,那么PWM是啥。
PWM(Pulse Width Modulation)控制——脈沖寬度調制技術,通過對一系列脈沖的寬度進行調制,來等效地獲得所需要波形(含形狀和幅值)。其具有兩個很重要的參數:頻率和占空比。
頻率就是周期的倒數,單位Hz(赫茲)
周期=1/頻率 100HZ就是10ms一個周期
如果設置的頻率為100Hz,就是說也就是說一個周期是10ms 那么一秒鐘就有 100次PWM周期
占空比就是高電平在一個周期內所占的比例,單位 %(百分之)
直接看PWM方波的示意圖,會比較容易理解。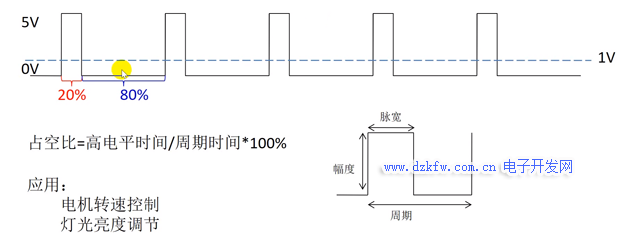
首先看周期和脈寬表示: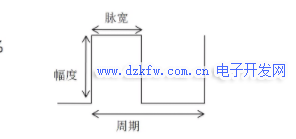
脈寬(時間):高電平時間
周期:一個脈沖信號的時間
(從幅度開始到下一個幅度前結束,高電平(脈寬)時間+低電平時間)
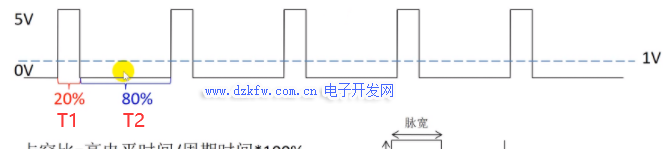
在上圖中,頻率F的值為1/(T1 T2),占空比D的值為T1/(T1 T2)。通過改變單位時間內脈沖的個數可以實現調頻;通過改變占空比可以實現調壓。
占空比越大,所得到的平均電壓也就越大,幅值也就越大;占空比越小,所得到的平均電壓也就越小,幅值也就越小。
上圖平均電壓我們可以轉化一下。即5V*20%+0V*80%=1V
如果是12V電機,占空比為30%,可以自行算平均電壓了哦12V*30%+0V*70%=3.6V
注意:是相當于電壓,實際還是信號
PWM對電機轉速的控制通過以上原理就可以知道,只要改變PWM信號的占空比,就可以改變直流電機兩端的平均電壓,從而實現直流電機的調速。
對于直流電機來講,電機輸出端引腳是高電平電機就可以轉動,當輸出端高電平時,電機會轉動,但速度是一點一點提升的,在高電平突然轉向低電平時,電機由于電感有防止電流突變的作用是不會停止的,會保持這原有的轉速,以此往復,電機的轉速就是周期內輸出的平均電壓值,所以實質上我們調速是將電機處于一種,似停非停,似全速轉動又非全速轉動的狀態,那么在一個周期的平均速度就是我們占空比調出來的速度了。
在電機控制中,電壓越大,電機轉速越快,而通過PWM輸出不同的模擬電壓,便可以使電機達到不同的輸出轉速當然,在電機控制中,不同的電機都有其適應的頻率 頻率太低會導致運動不穩定,如果頻率剛好在人耳聽覺范圍,有時還會聽到呼嘯聲。
電機頻率在 6-16kHZ之間為好
電機轉數與頻率的關系那我們在網上買的這種小型直流電機都給了轉速,可是我們和開發板聯合使用前要先設置頻率,這個頻率根據什么來設置呢?
比如我在某寶上看到的電機信息如下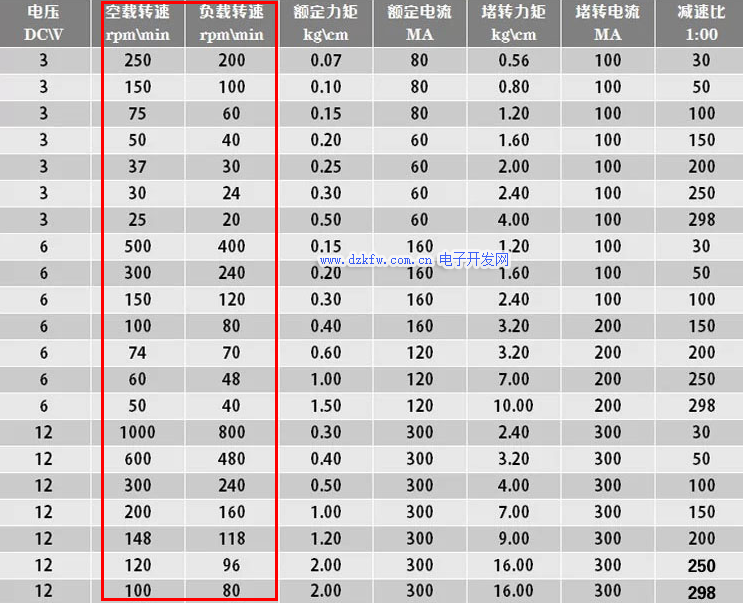
我現在選擇12V 300轉的電機,我頻率要怎么設置。(這里為理論,后續要自己做調整。)
有公式哦-
電機轉速與頻率公式:n=60f/p
n——電機轉速
60——每分鐘(秒)
f——電源頻率
p——極對數(我們用在創客中的這種小馬達默認為1也就是3000)
轉換一下就可以通過轉速求我們應設置的頻率了
f=np/60
我們之前選的300轉,可以求我們應設置的頻率了
f=300*3000/60
f=900000/60
f=15000Hz
注意:以上都為理論值,實際情況可能會很復雜,比如電壓(這里是按照給的電壓來算的,實際可能提供不了這么高的電壓。),使用的驅動芯片之類的。這里只是做一個參考,因為實戰發現,按需調整頻率是個細活!——頻率太高電機可能反應不過來,低了又驅動不起來。謹以此參考,后續需要朋友們慢慢去調試。!
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底