
Į±╠ņŠ═║═┤¾╝ęę╗ŲüĒ┐éĮYę╗Ž┬├}ø_«ö┴┐║═ļŖūė²X▌å▒╚Ą─ėŗ╦ŃŻ¼ĘŪ│ŻīŹė├Ż¼ė^š▀Č©Ģ■Å─ųą╩▄ĄĮåó░lĪŻ
╦┼Ę■Č©╬╗┐žųŲŽĄĮyę╗░Ńė╔ųĖ┴Ņ▓┐ĘųĪó“īäė▓┐Ęų║═ł╠ąą▓┐ĘųĄ╚ĮM│╔Ż¼╚ńŽ┬łD╦∙╩ŠŻ║
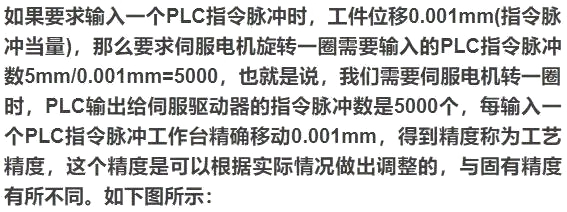
├}ø_«ö┴┐Ż║╦┼Ę■Įė╩▄╔Ž╬╗ÖC░l│÷Ą─├┐ę╗éĆ├}ø_ą┼╠¢Ą─╬╗ęŲ┴┐Ż¼ėųĘQū„ūŅąĪųĖ┴ŅįOČ©å╬╬╗ĪŻ░┤ÖC┤▓įOėŗĄ─╝ė╣żŠ½Č╚▀x╚ĪŻ¼Ųš═©Š½Č╚ÖC┤▓ę╗░Ń╚Ī├}ø_«ö┴┐0.01mmŻ¼▌^Š½├▄ÖC┤▓╚Ī0.001mm╗“0.005mmĪŻį┌īŹļH╣żū„ųąŻ¼│Żė├Ą─Š½Č╚å╬╬╗╩ŪĮzŻ¼1ĮzĄ╚ė┌0.01mmĪŻ
£p╦┘▒╚Ż║╩ŪųĖ£p╦┘ÖCśŗųą▌ö╚ļ▐D╦┘┼c▌ö│÷▐D╦┘Ą─▒╚ųĄĪŻ
Ę┤ü├}ø_Ż║╦┼Ę■ļŖÖCŠÄ┤aŲ„Ą─Ęų▒µ┬╩Ż¼ŠÄ┤aŲ„Ą─Ę┤ü├}ø_ĪŻ
ųĖ┴Ņ├}ø_Ż║╔Ž╬╗ÖC░l│÷Ą─├}ø_╝┤PLCĮoČ©Ą─├}ø_Ż¼ę▓┐╔ęįšf╩Ū═Ō▓┐ĮoČ©├}ø_ĪŻ
CMX Ż║ļŖūė²X▌å▒╚Ą─Ęųūė╩ŪļŖÖCŠÄ┤aŲ„Ę┤ü├}ø_Ż¼ę▓┐╔ęįšf╩ŪŠÄ┤aŲ„Ęų▒µ┬╩ĪŻ
CDV Ż║ļŖūė²X▌å▒╚Ą─Ęų─Ė╩Ū╔Ž╬╗ÖCĄ─ĮoČ©├}ø_Ż©ųĖ┴Ņ├}ø_Ż®ĪŻ
ļŖūė²X▌å▒╚Ż║╩Ūė├üĒ░č╔Ž╬╗ÖCĄ─ĮoČ©├}ø_ę¬ōQ╦Ń│╔┼cļŖÖCŠÄ┤aŲ„Ę┤ü├}ø_═¼Ą╚ęŌ┴xŻ¼ęį▒Ń┐žųŲųąą─░┤ĮoČ©ųĖ┴Ņę¬Ū¾┐žųŲ╦┼Ę■▐DäėČ©╬╗ĪŻ
ļŖūė²X▌åŻ║ļŖūė²X▌åŠ═╩Ūė├ļŖ┬Ę─ŻĘ┬īŹļHųąĄ─²X▌åé„äėŻ¼╩Ūę╗ĘN╠ōöM²X▌åé„äėŻ¼▓╗ąĶīŹ╬’Ż¼Č°Ūę┐╔ęį¤ośOš{╦┘ĪŻÅV┴xĄ─šfŠ═╩Ūī”▌ö╚ļ┴┐▀Mąą╚╬ęŌĘ┼┤¾╗“┐sąĪÅ─Č°Ą├ĄĮ▓╗═¼Ą─▌ö│÷┴┐ĪŻ
Ž┬├µė├Š▀¾wöĄō■üĒšf├„├}ø_«ö┴┐║═ļŖūė²X▌å▒╚Ą─║¼┴x║═ėŗ╦Ń▀^│╠Ż║
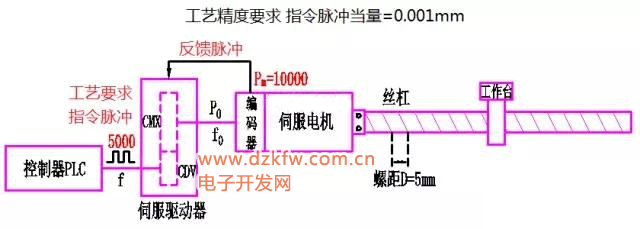
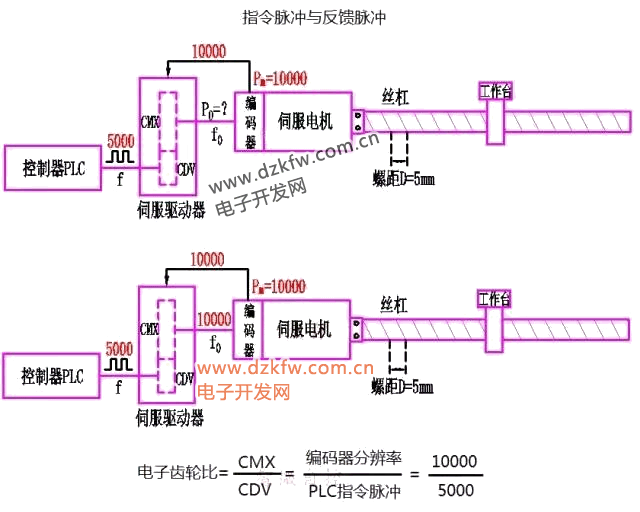
═¼śėČ╝╩ŪūīļŖÖC▌Są²▐Dę╗╚”Ż¼PLCŽ“╦┼Ę■“īäėŲ„▌ö│÷Ą─ųĖ┴Ņ├}ø_┴┐╩Ū5000Ż¼Č°ļŖÖCČ╦ŠÄ┤aŲ„Ę┤ü10000éĆÖz£y├}ø_Ż¼┐╔ų¬╦┼Ę■“īäėŲ„Ž“ļŖÖCČ╦▌ö│÷10000éĆÖz£y├}ø_Ż¼╦Ų║§┼cPLC░l│÷Ą─ųĖ┴Ņ├}ø_öĄ┴┐5000öĄō■▓╗ŽÓĘ¹Ż¼šf├„į┌╦┼Ę■“īäėŲ„ā╚▓┐ī”├}ø_┴┐▀Mąą┴╦Ę┼┤¾Ż¼ŲõīŹŠ═╩Ū═©▀^╦┼Ę■“īäėŲ„ā╚▓┐╠ōöMļŖūė²X▌åüĒīŹ¼FĄ─Ż¼└¹ė├ļŖūė²X▌åĄ─ļŖūė²X▌å▒╚īóųĖ┴Ņ├}ø_┴┐5000ōQ╦Ń│╔ŠÄ┤aŲ„Ę┤ü├}ø_10000Ż¼┐╔Ą├ĄĮļŖūė²X▌å▒╚×ķ10000:5000ĪŻ╚ńŽ┬łD╦∙╩ŠŻ║
└²╚ńŻ║
╔Ž╬╗ÖC▌ö╚ļŅl┬╩100HZŻ¼ļŖūė²X▌å▒╚ĘųūėįO×ķ1Ż¼Ęų─ĖįO×ķ2Ż¼─Ū├┤╦┼Ę■“īäėŲ„īŹļH▀\ąą╦┘Č╚░┤šš50HZĄ─Ņl┬╩▀\ąąĪŻ
╔Ž╬╗ÖC▌ö╚ļŅl┬╩100HZŻ¼ļŖūė²X▌å▒╚ĘųūėįO×ķ2Ż¼Ęų─ĖįO×ķ1Ż¼─Ū├┤╦┼Ę■“īäėŲ„īŹļH▀\ąą╦┘Č╚░┤šš200HZĄ─Ņl┬╩▀\ąąĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū