
STEP7-MicroWIN SMART▀\äė┐žųŲŽ“ī¦
- ┤“ķ_STEP7Ą─Ī░▀\äė┐žųŲĪ▒Ž“ī¦Ż¼Ī░╣żŠ▀Ī▒->Ī░Ž“ī¦Ī▒->Ī░▀\äė┐žųŲĪ▒
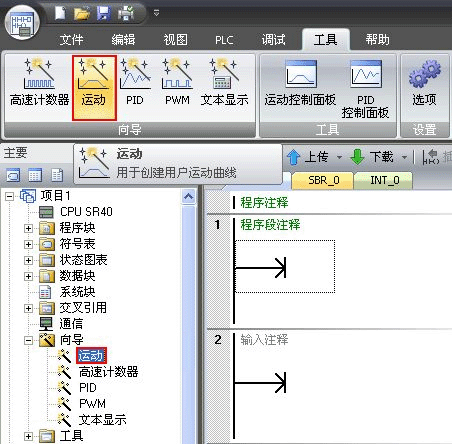
łD 1.┤“ķ_Ī░▀\äė┐žųŲĪ▒Ž“ī¦
- ▀xō±ąĶę¬┼õų├Ą─▌S
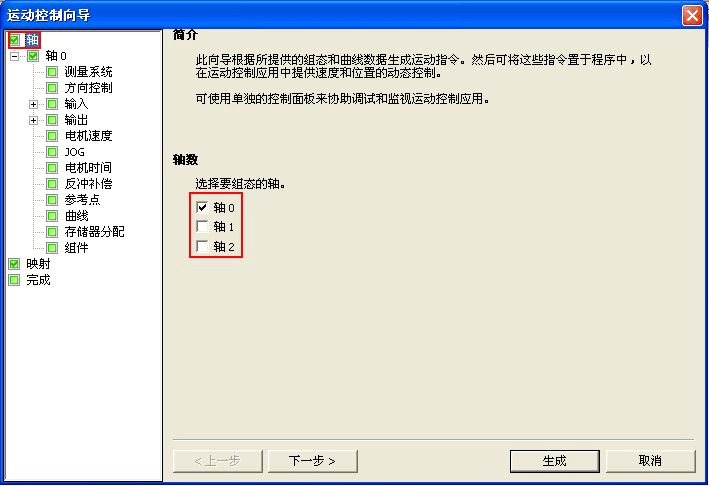
łD 2.▀xō±ąĶę¬┼õų├Ą─▌S
- ×ķ╦∙▀xō±Ą─▌S├³├¹
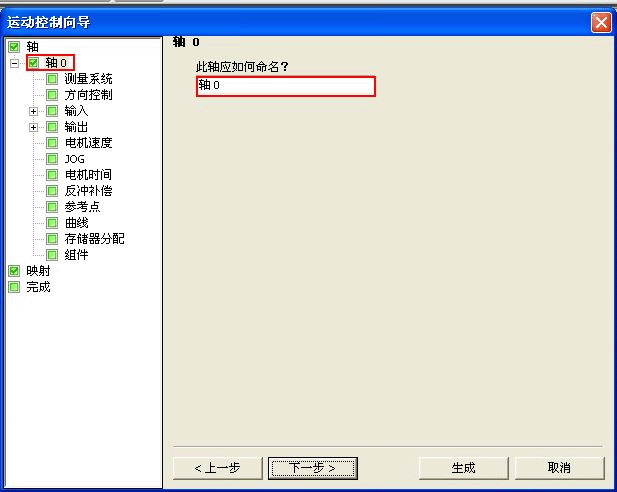
łD 3.×ķ╦∙▀xō±Ą─▌S├³├¹
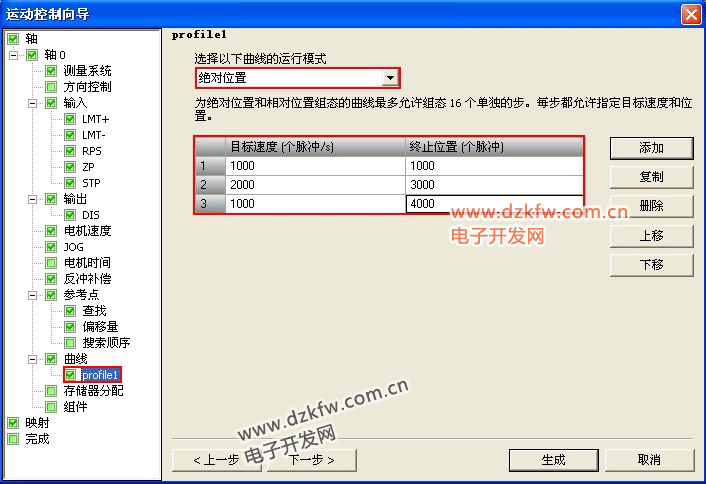
- ▌ö╚ļŽĄĮyĄ─£y┴┐ŽĄĮyŻ©Ī░╣ż│╠┴┐Ī▒╗“š▀Ī░├}ø_öĄ/▐DĪ▒Ż®
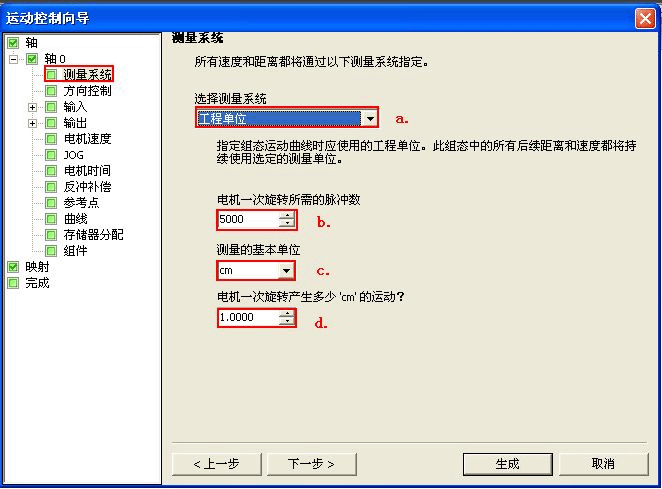
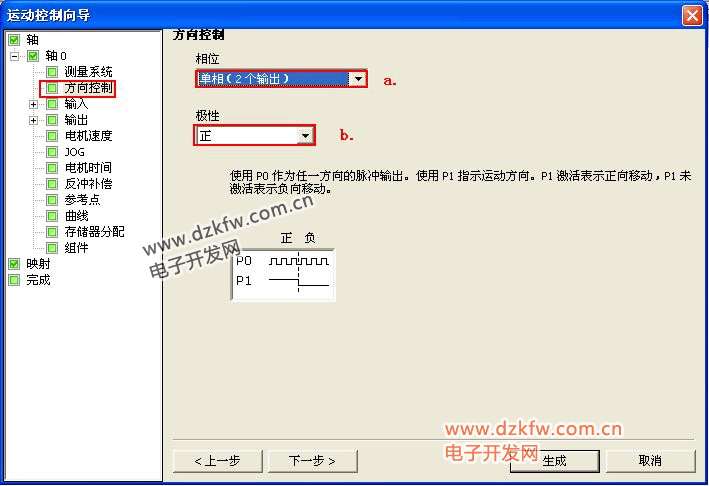
łD 4.▀xō±£y┴┐ŽĄĮy
a.▀xō±╣ż│╠å╬╬╗╗“š▀╩Ū├}ø_öĄŻ╗
b.▀xō±ļŖÖC├┐▐D├}ø_öĄŻ╗
c.▀xō±╗∙▒Šå╬╬╗ Ż╗
d.▌ö╚ļļŖÖC├┐▐D▀\ąąŠÓļx
- įOų├├}ø_ĘĮŽ“▌ö│÷
łD 5.įOų├├}ø_ĘĮŽ“▌ö│÷
a.įOų├ėąÄū┬Ę├}ø_▌ö│÷Ż©å╬ŽÓŻ║1┬ĘĪóļpŽ“Ż║2┬ĘĪóš²Į╗Ż║2┬ĘŻ®Ż╗
b.įOų├├}ø_▌ö│÷śOąį║═┐žųŲĘĮŽ“ĪŻ
- Ęų┼õ▌ö╚ļ³c
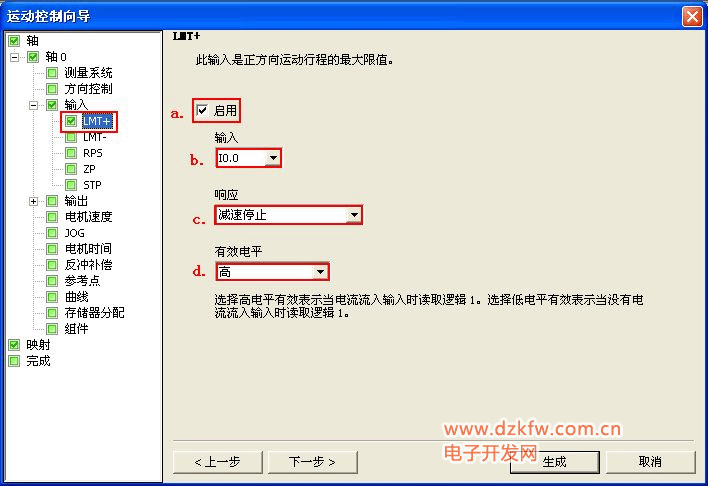
łD 6.┼õų├š²Ž▐╬╗▌ö╚ļ³c
a.š²Ž▐╬╗╩╣─▄Ż╗
b.š²Ž▐╬╗▌ö╚ļ³cŻ╗
c.ųĖČ©ŽÓæ¬▌ö╚ļ³cėąą¦ĢrĄ─Ēææ¬ĘĮ╩ĮŻ╗
d.ųĖČ©▌ö╚ļą┼╠¢ėąą¦ļŖŲĮŻ©Ą═ļŖŲĮėąą¦╗“š▀Ė▀ļŖŲĮėąą¦Ż®ĪŻ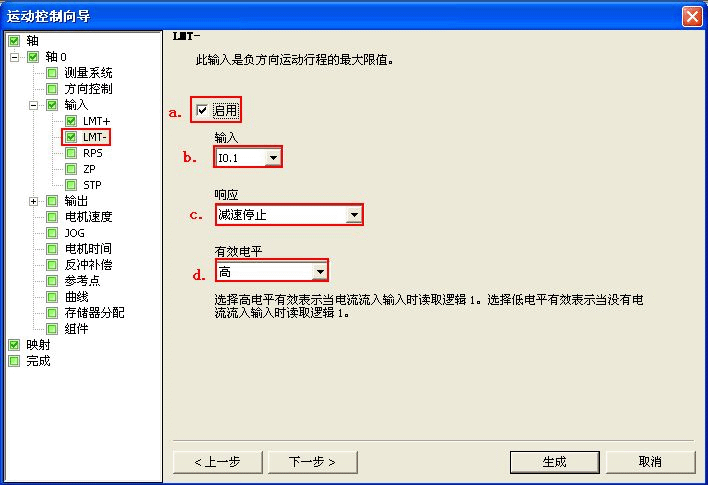
łD 7.┼õų├žōŽ▐╬╗▌ö╚ļ³c
a.žōŽ▐╬╗╩╣─▄Ż╗
b.žōŽ▐╬╗▌ö╚ļ³cŻ╗
c.ųĖČ©ŽÓæ¬▌ö╚ļ³cėąą¦ĢrĄ─Ēææ¬ĘĮ╩ĮŻ╗
d.ųĖČ©▌ö╚ļą┼╠¢ėąą¦ļŖŲĮŻ©Ą═ļŖŲĮėąą¦╗“š▀Ė▀ļŖŲĮėąą¦Ż®ĪŻ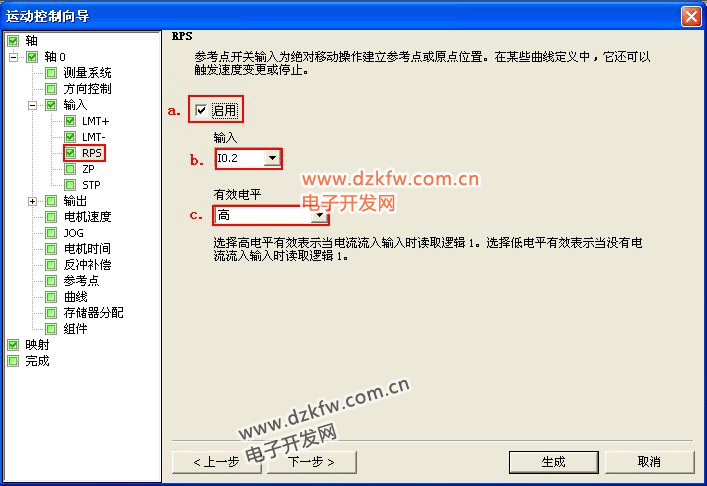
łD 8.┼õų├ģó┐╝³c
a.╩╣─▄ģó┐╝³cŻ╗
b.ģó┐╝³c▌ö╚ļ³cŻ╗
c.ųĖČ©▌ö╚ļą┼╠¢ėąą¦ļŖŲĮŻ©Ą═ļŖŲĮėąą¦╗“š▀Ė▀ļŖŲĮėąą¦Ż®ĪŻ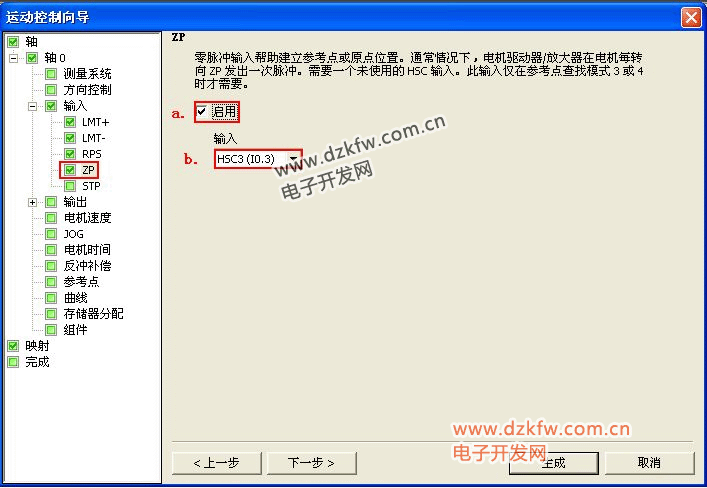
łD 9.┼õų├┴Ń├}ø_
a.╩╣─▄┴Ń├}ø_Ż║
b.┴Ń├}ø_▌ö╚ļ³cĪŻ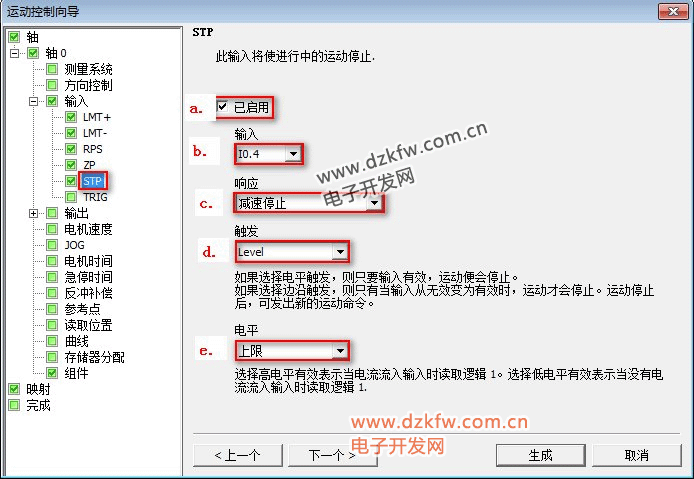
łD 10.┼õų├═Żų╣³c
a.╩╣─▄═Żų╣³cŻ╗
b.═Żų╣▌ö╚ļ³cŻ╗
c.ųĖČ©ŽÓæ¬▌ö╚ļ³cėąą¦ĢrĄ─Ēææ¬ĘĮ╩ĮŻ╗
d.ųĖČ©▌ö╚ļą┼╠¢Ą─ė|░lĘĮ╩ĮŻ¼┐╔ęį▀xō±ļŖŲĮė|░l╗“š▀▀ģčžė|░lĪŻ
e.ųĖČ©▌ö╚ļą┼╠¢ėąą¦ļŖŲĮŻ©Ą═ļŖŲĮėąą¦╗“š▀Ė▀ļŖŲĮėąą¦Ż®ĪŻ
Ī’ūóęŌŻ║ĻPė┌▌ö╚ļ³cĄ─Ęų┼õ┼cČ©┴xšłģó┐┤ Ī·▀\äė┐žųŲ▌ö╚ļ/▌ö│÷Č©┴x
- Č©┴x▌ö│÷³c
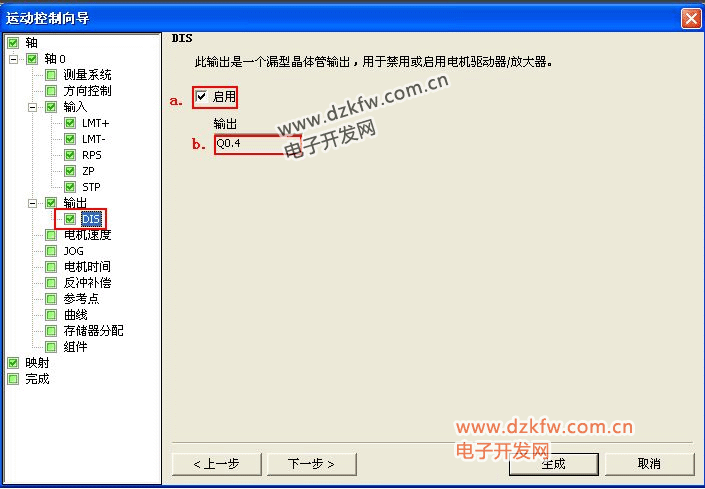
łD 11.Č©┴x▌ö│÷³c
Ī’ ūóęŌŻ║├┐éĆ▌SĄ─▌ö│÷³cČ╝╩Ū╣╠Č©Ą─ė├æ¶▓╗─▄ī”Ųõ▀Mąąą▐Ė─Ż¼Ą½╩Ū┐╔ęį▀xō±╩╣─▄/▓╗╩╣─▄ DISĪŻ
ĻPė┌▌ö│÷³cĄ─Č©┴xšłģó┐┤ Ī·▀\äė┐žųŲ▌ö╚ļ/▌ö│÷Č©┴x
- Č©┴xļŖÖCĄ─╦┘Č╚
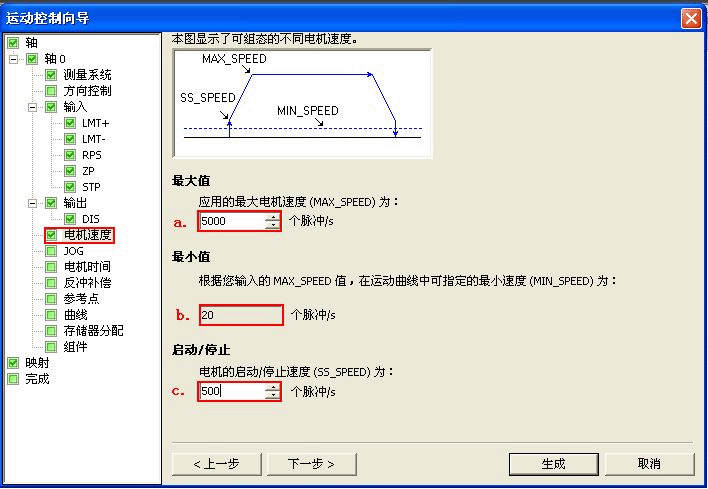
łD 12.Č©┴xļŖÖCĄ─╦┘Č╚
a.Č©┴xļŖÖC▀\äėĄ─ūŅ┤¾╦┘Č╚Ī░MAX_SPEEDĪ▒Ż╗
b.Ė∙ō■Č©┴xĄ─ūŅ┤¾╦┘Č╚Ż¼į┌▀\äėŪ·ŠĆųą┐╔ęįųĖČ©Ą─ūŅąĪ╦┘Č╚Ż╗
c.Č©┴xļŖÖC▀\äėĄ─åóäė/═Żų╣╦┘Č╚Ī░SS_SPEEDĪ▒ ĪŻ
- Č©┴x³cäėģóöĄ
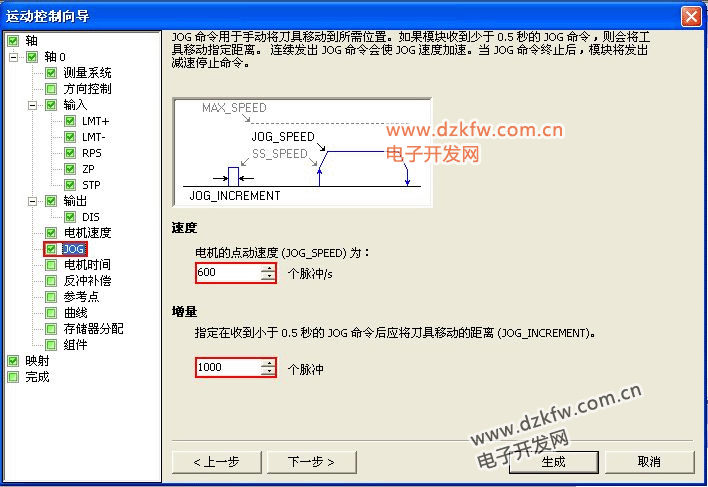
łD 13.Č©┴x³cäėģóöĄ
a.Č©┴x³cäė╦┘Č╚Ī░JOG_SPEEDĪ▒Ż©ļŖÖCĄ─³cäė╦┘Č╚╩Ū³cäė├³┴Ņėąą¦Ģr─▄ē“Ą├ĄĮĄ─ūŅ┤¾╦┘Č╚Ż®Ż╗
b.Č©┴x³cäė╬╗ęŲĪ░JOG_INCREMENTĪ▒Ż©³cäė╬╗ęŲ╩Ū╦▓ķgĄ─³cäė├³┴Ņ─▄ē“īó╣ż╝■▀\äėĄ─ŠÓļxŻ®ĪŻ
Ī’ ūóęŌŻ║«ö CPU ╩šĄĮę╗éĆ³cäė├³┴Ņ║¾Ż¼╦³åóäėę╗éĆČ©ĢrŲ„ĪŻ╚ń╣¹³cäė├³┴Ņį┌0.5├ļĄĮĢrų«Ū░ĮY╩°Ż¼CPU ätęįČ©┴xĄ─SS_SPEED╦┘Č╚īó╣ż╝■▀\äėJOG_INCREMENTöĄųĄųĖČ©Ą─ŠÓļxĪŻ«ö0.5├ļĄĮĢrĢrŻ¼³cäė├³┴Ņ╚į╚╗╩Ū╝ż╗ŅĄ─Ż¼CPU ╝ė╦┘ų┴JOG_SPEED╦┘Č╚ĪŻ└^└m▀\äėų▒ų┴³cäė├³┴ŅĮY╩°,ļS║¾£p╦┘═Żų╣ĪŻ
- ╝ė/£p╦┘ĢrķgįOų├
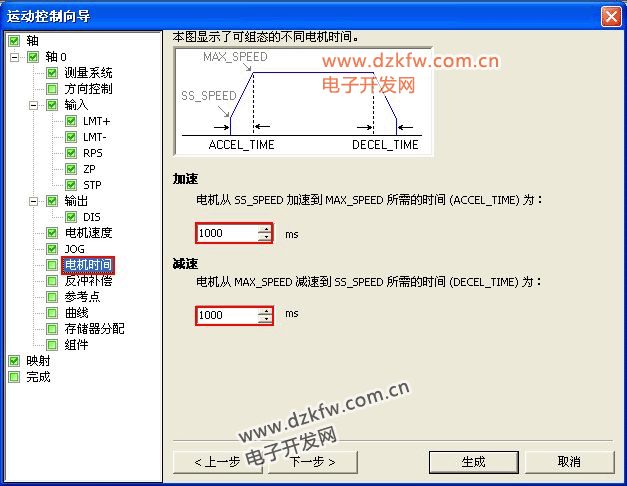
łD 14.╝ė/£p╦┘ĢrķgįOų├
a.įOų├Å─åóäė/═Żų╣╦┘Č╚Ī░SS_SPEEDĪ▒ĄĮūŅ┤¾╦┘Č╚Ī░MAX_SPEED"Ą─╝ė╦┘Č╚ĢrķgĪ░ACCEL_TIMEĪ▒Ż╗
b.įOų├Å─ūŅ┤¾╦┘Č╚Ī░MAX_SPEEDĪ▒ĄĮåóäė/═Żų╣╦┘Č╚Ī░SS_SPEEDĪ▒Ą─£p╦┘Č╚ĢrķgĪ░DECEL_TIME Ī▒ĪŻ
- Č©┴xĘ┤ø_čaāö
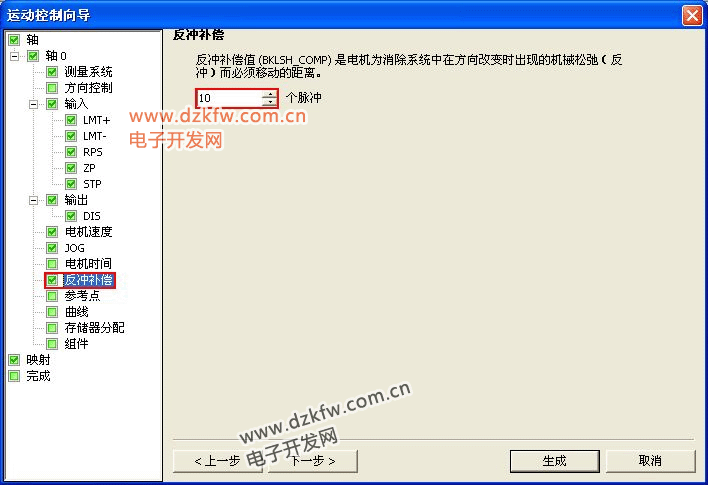
łD 15.Č©┴xĘ┤ø_čaāö
Ī’ ūóęŌŻ║Ę┤ø_čaāö×ķ«öĘĮŽ“░l╔·ūā╗»ĢrŻ¼×ķŽ¹│²ŽĄĮyųąę“ÖCąĄ─źōpČ°«a╔·Ą─š`▓ŅŻ¼ļŖÖC▒žĒÜ▀\äėĄ─ŠÓļxĪŻĘ┤ø_čaāö┐é╩Ūš²ųĄĪŻŻ©╚▒╩Ī=0Ż®
- ╩╣─▄īżšęģó┐╝³c╬╗ų├
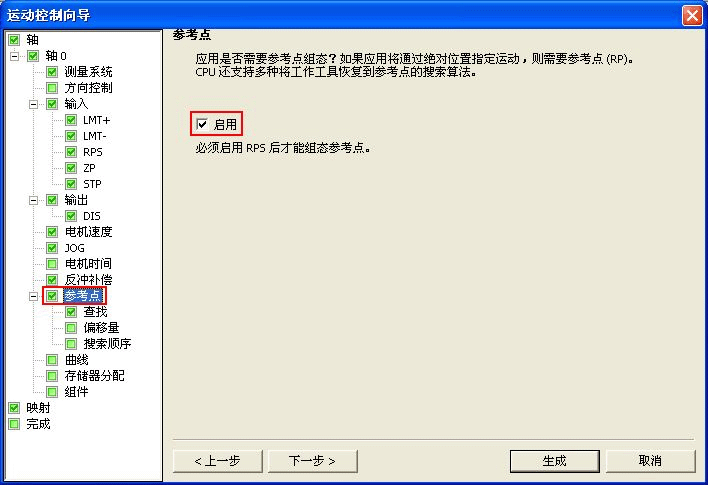
łD 16. ╩╣─▄īżšęģó┐╝³c╬╗ų├
Ī°ūóęŌŻ║╚¶─·Ą─æ¬ė├ąĶę¬Å─ę╗éĆĮ^ī”╬╗ų├╠Äķ_╩╝▀\äė╗“ęįĮ^ī”╬╗ų├ū„×ķģó┐╝Ż¼─·▒žĒÜĮ©┴óę╗éĆģó┐╝³cŻ©RPŻ®╗“┴Ń³c╬╗ų├Ż¼įō³cīó╬╗ų├£y┴┐╣╠Č©ĄĮ╬’└ĒŽĄĮyĄ─ę╗éĆęčų¬³c╔ŽĪŻ
- įOų├īżšęģó┐╝³c╬╗ų├ģóöĄ
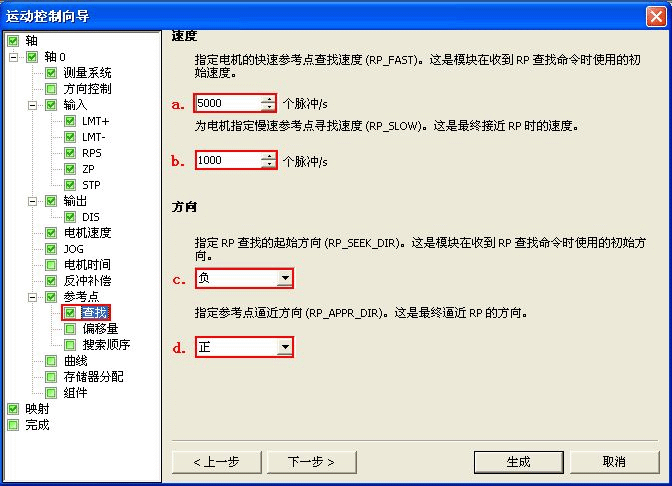
łD 17.įOų├īżšęģó┐╝³cģó
a.Č©┴x┐ņ╦┘īżšę╦┘Č╚Ī░RP_FASTĪ▒Ż©┐ņ╦┘īżšę╦┘Č╚╩Ū─ŻēKł╠ąąRPīżšę├³┴ŅĄ─│§╩╝╦┘Č╚Ż¼═©│ŻRP_FAST╩ŪMAX_SPEEDĄ─2/3ū¾ė꯮Ż╗
b.Č©┴x┬²╦┘īżšę╦┘Č╚Ī░RP_SLOWĪ▒Ż©┬²╦┘īżšę╦┘Č╚╩ŪĮėĮ³RPĄ─ūŅĮK╦┘Č╚Ż¼═©│Ż╩╣ė├ę╗éĆ▌^┬²Ą─╦┘Č╚╚źĮėĮ³RPęį├ŌÕe▀^Ż¼RP_SLOWĄ─Ąõą═ųĄ×ķSS_SPEEDŻ®Ż╗
c.Č©┴x│§╩╝īżšęĘĮŽ“Ī░RP_SEEK_DIRĪ▒Ż©│§╩╝īżšęĘĮŽ“╩ŪRPīżšę▓┘ū„Ą─│§╩╝ĘĮŽ“ĪŻ═©│ŻŻ¼▀@éĆĘĮŽ“╩ŪÅ─╣żū„ģ^ĄĮRPĖĮĮ³ĪŻŽ▐╬╗ķ_ĻPį┌┤_Č©RPĄ─īżšęģ^ė“Ģr░ńč▌ųžę¬ĮŪ╔½ĪŻ«öł╠ąąRPīżšę▓┘ū„ĢrŻ¼ė÷ĄĮŽ▐╬╗ķ_ĻPĢ■ę²ŲĘĮŽ“Ę┤▐DŻ¼╩╣īżšę─▄ē“└^└mŽ┬╚źŻ¼─¼šJĘĮŽ“=Ę┤Ž“Ż®Ż╗
d.Č©┴xūŅĮKģó┐╝³cĮėĮ³ĘĮŽ“Ī░RP_APPR_DIRĪ▒Ż¼Ż©ūŅĮKģó┐╝³cĮėĮ³ĘĮŽ“╩Ū×ķ┴╦£pąĪĘ┤ø_║═╠ß╣®Ė³Ė▀Ą─Š½Č╚Ż¼æ¬įō░┤ššÅ─RPęŲäėĄĮ╣żū„ģ^╦∙╩╣ė├Ą─ĘĮŽ“üĒĮėĮ³ģó┐╝³cŻ¼─¼šJĘĮŽ“=š²Ž“Ż®ĪŻ
- įOų├ģó┐╝³cŲ½ęŲ┴┐
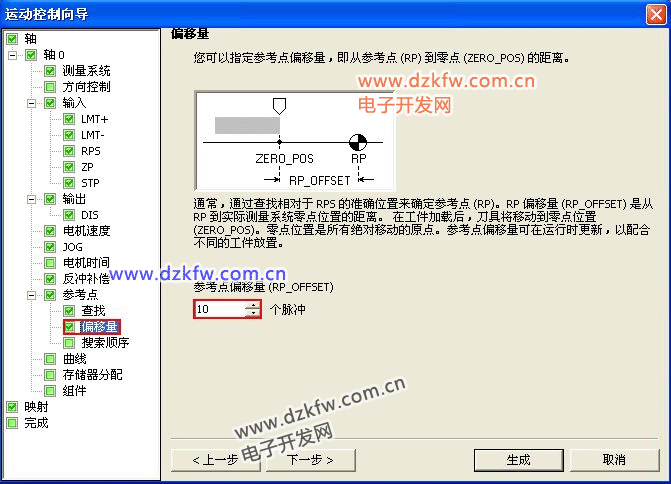
łD 18.įOų├ģó┐╝³cŲ½ęŲ┴┐
Ī’ūóęŌŻ║ģó┐╝³cŲ½ęŲ┴┐Ī░RP_OFFSET╩ŪĪ▒į┌╬’└ĒĄ─£y┴┐ŽĄĮyųąRPĄĮ┴Ń╬╗ų├ų«ķgĄ─ŠÓļxŻ¼╚▒╩Ī=0ĪŻ
- įOų├īżšęģó┐╝³cĒśą“
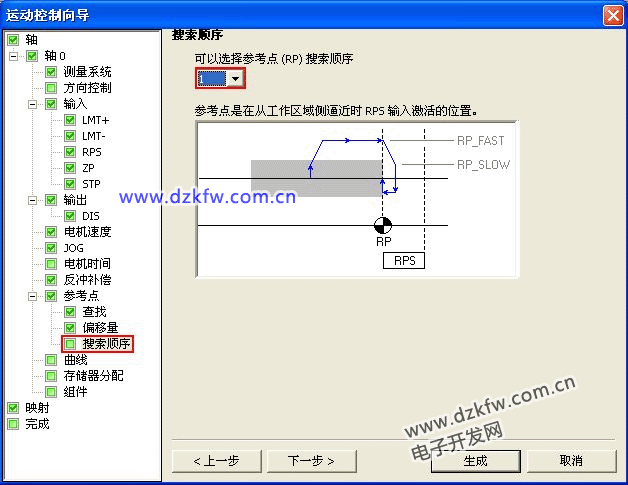
łD 19.įOų├īżšęģó┐╝³cĒśą“
S7-200 SMART ╠ß╣®4ųąīżšęģó┐╝³cĒśą“─Ż╩ĮŻ¼├┐ĘN─Ż╩ĮČ©┴x╚ńŽ┬Ż║
RPīżšę─Ż╩Į1Ż║RP╬╗ė┌RPS▌ö╚ļėąą¦ģ^ĮėĮ³╣żū„ģ^Ą─ę╗▀ģķ_╩╝ėąą¦Ą─╬╗ų├╔ŽŻ╗
RPīżšę─Ż╩Į2Ż║RP╬╗ė┌RPS▌ö╚ļėąą¦ģ^Ą─ųąčļŻ╗
RPīżšę─Ż╩Į3Ż║RP╬╗ė┌RPS▌ö╚ļėąą¦ģ^ų«═ŌŻ¼ąĶę¬ųĖČ©į┌RPS╩¦ą¦ų«║¾æ¬Įė╩šČÓ╔┘éĆZPŻ©┴Ń├}ø_Ż®▌ö╚ļŻ╗
RPīżšę─Ż╩Į4Ż║RP═©│Ż╬╗ė┌RPS▌ö╚ļĄ─ėąą¦ģ^ā╚Ż¼ąĶę¬ųĖČ©į┌RPS╝ż╗Ņ║¾æ¬Įė╩šČÓ╔┘éĆZPŻ©┴Ń├}ø_Ż®▌ö╚ļĪŻ
ĻPė┌īżšęģó┐╝³c─Ż╩ĮĄ─įö╝Üą┼Žóšłģó┐╝Ż║
Ī·ĪČS7-200 SMART ŽĄĮy╩ųāįĪĘ
- ą┬Į©▀\äėŪ·ŠĆ▓ó├³├¹
łD 20.ą┬Į©▀\äėŪ·ŠĆ▓ó├³├¹
═©▀^³cō¶Ī░╠Ē╝ėŻ©AddŻ®Ī▒░┤Ōo╠Ē╝ėęŲäėŪ·ŠĆ▓ó├³├¹ĪŻ
Ī’ūóęŌŻ║S7-200 SMART ų¦│ųūŅČÓ32ĮMęŲäėŪ·ŠĆĪŻ▀\äė┐žųŲŽ“ī¦╠ß╣®ęŲäėŪ·ŠĆČ©┴xŻ¼į┌▀@└’Ż¼─·┐╔ęį×ķ─·Ą─æ¬ė├│╠ą“Č©┴x├┐ę╗éĆęŲäėŪ·ŠĆĪŻ▀\äė┐žųŲŽ“ī¦ųą┐╔ęį×ķ├┐éĆęŲäėŪ·ŠĆČ©┴xę╗éĆĘ¹╠¢├¹Ż¼Ųõū÷Ę©╩Ū─·į┌Č©┴xŪ·ŠĆĢr▌ö╚ļę╗éĆĘ¹╠¢├¹╝┤┐╔ĪŻ
- Č©┴x▀\äėŪ·ŠĆ
łD 21.Č©┴x▀\äėŪ·ŠĆ
a.▀xō±ęŲäėŪ·ŠĆĄ─▓┘ū„─Ż╩ĮŻ©ų¦│ų╦─ĘN▓┘ū„─Ż╩ĮŻ║Į^ī”╬╗ų├ĪóŽÓī”╬╗ų├Īóå╬╦┘▀B└mą²▐DĪóā╔╦┘▀B└m▐DäėŻ®Ż╗
b.Č©┴xįōęŲäėŪ·ŠĆ├┐ę╗Č╬Ą─╦┘Č╚║═╬╗ų├Ż©S7-200 SMART ├┐ĮMęŲäėŪ·ŠĆų¦│ųūŅČÓ16▓ĮŻ®ĪŻ
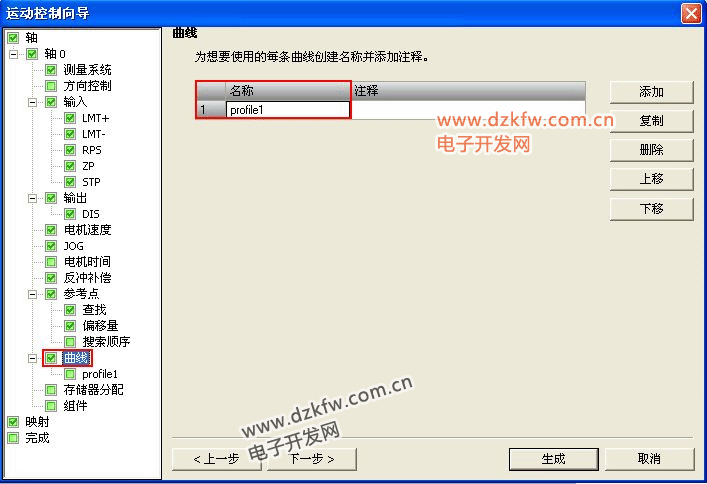
- ×ķ┼õų├Ęų┼õ┤µā”ģ^
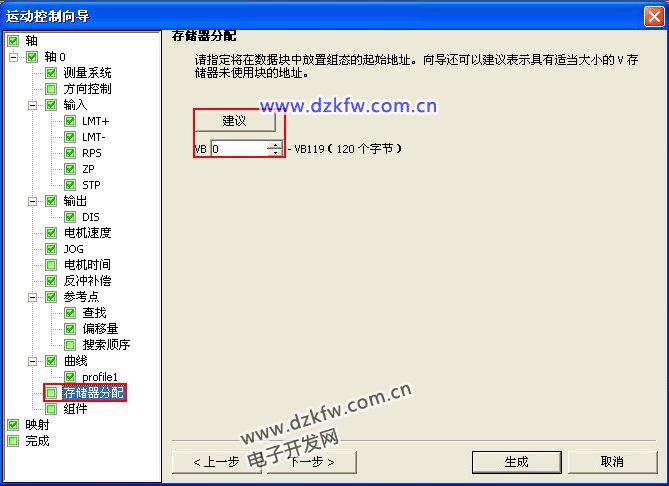
łD 22.×ķ┼õų├Ęų┼õ┤µā”ģ^
═©▀^³cō¶Ī░Į©ūhŻ©SuggestŻ®Ī▒░┤ŌoĘų┼õ┤µā”ģ^
Ī°ūóęŌŻ║│╠ą“ųąŲõ╦¹▓┐Ęų▓╗─▄š╝ė├įōŽ“ī¦Ęų┼õĄ─┤µā”ģ^ĪŻ
- ═Ļ│╔ĮMæB
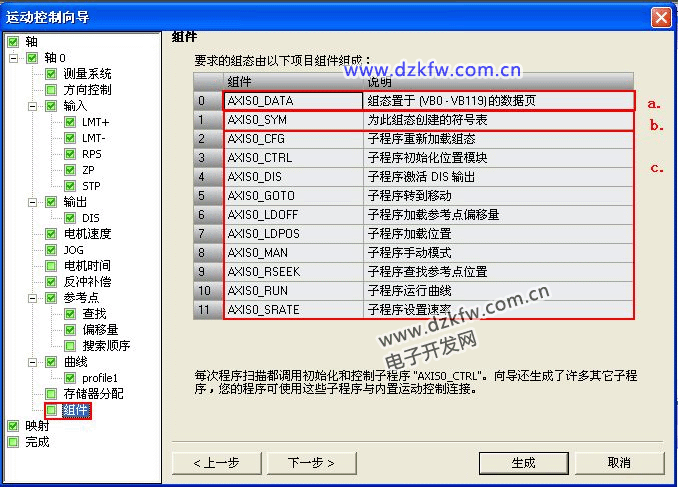
łD 23.Ž“ī¦╔·│╔Ą─ĮM╝■
«ö─·═Ļ│╔ī”▀\äė┐žųŲŽ“ī¦Ą─ĮMæBĢrŻ¼ų╗ąĶ³cō¶╔·│╔Ż©GenerateŻ®Ż¼╚╗║¾▀\äė┐žųŲŽ“ī¦Ģ■ł╠ąąęįŽ┬╚╬䚯║
a. īóĮMæB║═Ū·ŠĆ▒Ē▓Õ╚ļĄĮ─·Ą─ S7-200 SMART CPU Ą─öĄō■ēKŻ©AXISx_DATAŻ®ųąŻ╗
b. ×ķ▀\äė┐žųŲģóöĄ╔·│╔ę╗éĆ╚½ŠųĘ¹╠¢▒ĒŻ©AXISx_SYMŻ®Ż╗
c. į┌ĒŚ─┐Ą─│╠ą“ēKųąį÷╝ė▀\äė┐žųŲųĖ┴Ņūė│╠ą“Ż¼─·┐╔į┌æ¬ė├ųą╩╣ė├▀@ą®ųĖ┴ŅŻ╗
ꬹ▐Ė─╚╬║╬ĮMæB╗“Ū·ŠĆą┼ŽóŻ¼─·┐╔ęįį┘┤╬▀\ąą▀\äė┐žųŲŽ“ī¦ĪŻ
Ī°ūóęŌŻ║ė╔ė┌▀\äė┐žųŲŽ“ī¦ą▐Ė─┴╦│╠ą“ēKĪóöĄō■ēK║═ŽĄĮyēKŻ¼ę¬┤_▒Ż▀@╚²ĘNēKČ╝Ž┬▌dĄĮ S7-200 SMART CPU ųąĪŻĘ±ätŻ¼CPU ┐╔─▄Ģ■¤oĘ©Ą├ĄĮ▓┘ū„╦∙ąĶĄ─╦∙ėą│╠ą“ĮM╝■ĪŻ
- ▓ķ┐┤▌ö╚ļ▌ö│÷³cĘų┼õ
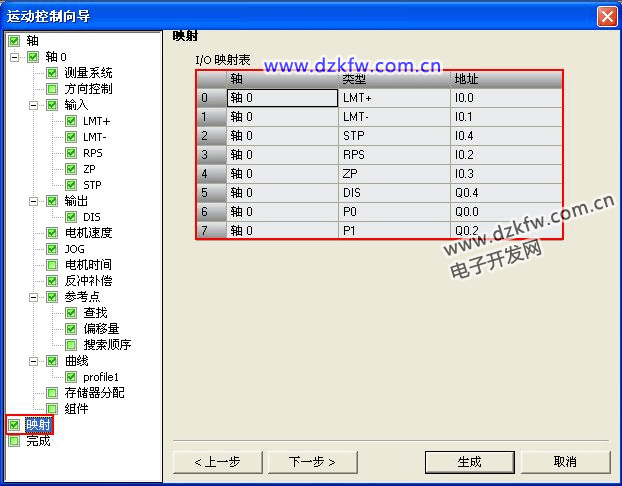
łD 24.▌ö╚ļ▌ö│÷³cĘų┼õ
═Ļ│╔┼õų├║¾▀\äė┐žųŲŽ“ī¦Ģ■’@╩Š▀\äė┐žųŲ╣”─▄╦∙š╝ė├Ą─ CPU ▒Š¾w▌ö╚ļ▌ö│÷³cĄ─ŪķørĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū