
這次我們聊一聊激光測距模塊
我們用的是正點原子的STM32F103ZET6精英版。

一。VL53L0X 簡介
1.定義
VL53L0X 是 ToF 激光測距傳感器,利用飛行時間(ToF)原理,通過光子的飛行來回時間與光速的計算,實現測距應用。
二。測量模式
1.VL53L0X 傳感器提供了 3 種測量模式,單次測量,連續測量,定時測量。
2.三種測量模式
(1) Single ranging(單次測量) ,在該模式下只觸發執行一次測距測量,測量結束后,
VL53L0X 傳感器會返回待機狀態,等待下一次觸發。
(2) Continuous ranging(連續測量) ,在該模式下會以連續的方式執行測距測量。一
旦測量結束,下一次測量就會立即啟動,用戶必須停止測距才能返回到待機狀態,最后的一
次測量在停止前完成。
(3) Timed ranging(定時測量) ,在該模式下會以連續的方式執行測距測量。測量結
束后,在用戶定義的延遲時間之后,才會啟動下一次測量。用戶必須停止測距才能返回到待
機狀態,最后的一次測量在停機前完成。
三。ST 官方提供了 4 種不同的精度模式
注意:
針對不同的精度模式,測量時間也是有所區別的,
測量時間最快為高速模式,只需 20ms 內就可以采樣一次,但精度確存在有±5%的誤差范圍。
而在長距離精度模式下,測距距離能達到 2m,測量時間在 33ms 內,
但測量時需在黑暗條件(無紅外線)的環境下。
所以在實際的應用中,需根據當前的要求去選擇合適的精度模式,以達到最佳的測量效果。
四。工作流程
當上電,VL53L0X會進入Hw Standby狀態,這是待機狀態,功耗很低。然后拉高XSHUT引腳,讓VL53L0X進入Fw Boot狀態,開始準備測距。如果不需要待機狀態,可以把XSHUT接到AVDD上。VL53L0X處于休眠狀態是不能進行通信IIC
注意: VL53L0X有3種工作模式:
(1)單次模式:收到測距開始命令后,開始進行測量,測量完成后自動退出,進入Sw Standby狀態。
(2)連續模式:收到測距開始命令后,就一直進行測量,直到收到測距停止命令。收到測距停止命令時,會把最后一次測量完成才退出。
(3)連續間隔模式:收到測距開始命令后,開始進行測量,完成一次測量后,等待一段時間再進行
下次測量,直到收到測距停止命令。測量等待間隔時間可調。
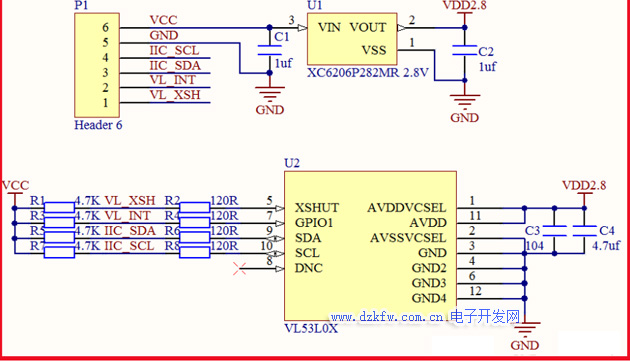
五。原理圖
六。引腳
1.基礎
模塊自帶了 2.8V 超低壓差穩壓芯片,給 VL53L0X 芯片供電,因此外部供電可以選擇: 3.3V/5V 都可以的。
模塊通過 P1 排針與外部連接,引出了 VCC、 GND、IIC_SDA、 IIC_SCL、 VL_INT、 VL_XSH 信號。
其中, IIC_SCL、 IIC_SDA、 VL_INT 和 VL_XSH帶了 4.7K 上拉電阻,外部可以不用再加上拉電阻了。
2.ATK-VL53L0X 激光測距傳感器模塊通過一個 1*6 的排針(P1)同外部電路連接,各引腳的詳細描述如表 2.1.1 所示:
七。core文件
1.core 文件夾下有四個重點.c 文件,
分別是: vl53l0x_api.c、 vl53l0x_api_calibration.c、vl53l0x_api_core.c 和 vl53l0x_api_strings.c
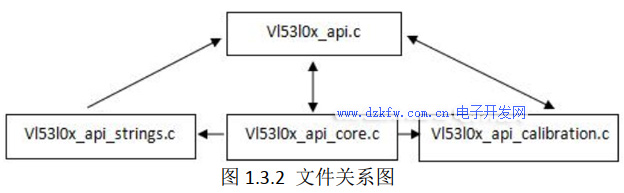
2.這四個 C 文件的關系可以用以下關系圖來表示
注釋:
- vl53l0x_api_core.c 文件,
提供有 vl53l0x 傳感器的底層操作核心函數。
2.vl53l0x_api_calibration.c 文件,
提供有 vl53l0x 傳感器校準操作的底層函數。
3 vl53l0x_api_strings.c 文件,
它實現信息內容的獲取,提供有獲取 vl53l0x 傳感器設備 ID信息的底層函數,以及提供根據功能函數返回的狀態值去獲得其狀態信息(字符串)的底層函數
4.vl53l0x_api.c 文件,
則對以上的底層函數進行封裝,提供包括系統初始化、測量模式配置、參數配置、校準功能、狀態信息獲取、以及中斷配置等 API 函數。在一般的使用時,直接調取 vl53l0x_api.c 提供的 API 函數就可以了。
下面是激光測距的API函數部分:
一。常用的API函數有這些
二。各個API函數的備注
1、 VL53L0X_Datalnit()函數
(1)該函數實現傳感器初始化,
(2)函數為 VL53L0X_DataInit(VL53L0X_DEV Dev),
(3)入口參數類型為 VL53L0X_DEV 結構體,結構體變量為設置傳感器的 I2C 地址等重要信息。
注意:在失能傳感器設備,到再重新使能設備,需調用該函數進行初始化。
2、 VL53L0X_Staticlnit()函數
(1)該函數實現傳感器寄存器值恢復默認初值和工作狀態切換為待機狀態
(2)函數為VL53L0X_StaticInit(VL53L0X_DEV Dev)
(3)入口參數為 VL53L0X_DEV 結構體變量,VL53L0X_DEV結構體變量為設置傳感器的 I2C 地址等重要信息
(4)該函數在初始化時進行調用
3、 VL53L0X_SetDeviceAddress()函數
(1)該函數實現修改傳感器設備的 I2C 地址
(2)函數為 VL53L0X_SetDeviceAddress(VL53L0X_DEVDev,uint8_t DeviceAddress)
(3)入口參數為 VL53L0X_DEV 結構體變量和 DeviceAddress 變量
(4)VL53L0X_DEV 結構體變量為設置傳感器 I2C 地址等重要信息
(5)DeviceAddress 變量為新設置的 I2C 地址
注意:重新使能設備后,I2C 地址為會恢復為默認的 0x52 地址
(6)若修改設備 I2C 地址,需在使能設備后進行調用
(7)設置的 I2C 地址必須為偶數,否則會出現通訊出錯
4、 VL53L0X_SetDeviceMode()函數
(1)該函數實現傳感器測量的工作模式配置
(2)函數為 VL53L0X_SetDeviceMode(VL53L0X_DEVDev,VL53L0X_DeviceModes DeviceMode)
(3)入口參數為 VL53L0X_DEV 結構體類型變量和VL53L0X_DeviceModes 類型變量
(4)VL53L0X_DEV 結構體變量為設置傳感器 I2C 地址等重要信息
(5)VL53L0X_DeviceModes 類型變量為設置的工作模式
其中包含 SINGLE_RANGING 單次測量、 CONTINUOUS_RANGING 連續測量和 TIMED_RANGING定時器測量
(6)該函數在測量前初始化進行調用
5、 VL53L0X_PerformSingleMeasurement()函數
(1)該函現實現啟動傳感器一次測量
(2)函數為VL53L0X_PerformSingleRangingMeasurement(VL53L0X_DEVDev,VL53L0X_RangingMeasurementData_t*pRangingMeasurementData)
(3)入口參數為 VL53L0X_DEV 結構體類型變量和 VL53L0X_RangingMeasurementData_t 結構體類型變量
(4)VL53L0X_DEV 結構體變量為設置傳感器 I2C 地址等重要信息
VL53L0X_RangingMeasurementData_t 結構體變量為返回測量距離的數據和測量范圍狀態等數據
(5)該函數一般在傳感器工作在單次測量模式下進行調用
6、 VL53L0X_StartMeasurement()和 VL53L0X_StopMeasurement()函數
(1)該函數分別實現了傳感器啟動測量和暫停測量
實現啟動測量的是VL53L0X_StartMeasurement()函數,
實現暫停測量的是VL53L0X_StopMeasurement()函數。
(2)函數為 VL53L0X_StartMeasurement(VL53L0X_DEV Dev) 和 VL53L0X_StopMeasurement(VL53L0X_DEV Dev)
(3)入口參數都為VL53L0X_DEV 結構體類型變量
(4)VL53L0X_DEV 結構體變量為設置傳感器 I2C 地址等重要信息
(5)這兩個函數一般在測量時進行使用
7、 VL53L0X_GetRangingMeasurementData()函數
(1)該函數實現獲取傳感器采樣的測量數據
(2)函數為 VL53L0X_PerformSingleRangingMeasurement(VL53L0X_DEV Dev,VL53L0X_Ranging MeasurementData_t *pRangingMeasurementData)
(3)入口參數為VL53L0X_DEV結構體類型變量和VL53L0X_RangingMeasurementData_t結構體類型變量
(4)VL53L0X_DEV 結構體變量為設置傳感器 I2C 地址等重要信息
(5)VL53L0X_RangingMeasurementData_t 結構體變量為返回測量距離的數據和測量范圍狀態等數據
(6)該函數一般在傳感器工作在連續測量模式下進行使用
8、 VL53L0X_SetGpioConfig()函數
(1)該函數實現測量中斷模式的配置功能
(2)函數為 VL53L0X_SetGpioConfig(VL53L0X_DEV Dev,uint8_t Pin,VL53L0X_DeviceModes DeviceMode, VL53L0X_GpioFunctionality Functionality,VL53L0X_InterruptPolarity Polarity)
(3)入口參數為 VL53L0X_DEV 結構體類型變量、 Pin 變量、VL53L0X_DeviceModes 類型變量VL53L0X_GpioFunctionality 類型變量 和VL53L0X_InterruptPolarity 類型變量。
其中五個變量的作用:
VL53L0X_DEV 結構體變量作用 設置傳感器 I2C 地址等重要信息
VL53L0X_DeviceModes 類型變量的作用 設置的測量工作模式(單次測量、連續測量、定時測量)
Pin 變量的作用 設置 GPIO 引腳口(使用時默認配置為 0)
VL53L0X_DeviceModes類型變量的作用 設置測量觸發中斷模式的
VL53L0X_InterruptPolarity 類型變量的作用 設置引腳的觸發模式(包含上升沿和下降沿)
注意:
VL53L0X_DeviceModes類型變量包含以下三種模式
CROSSED_LOW(采樣距離<下限值)
CROSSED_HIGH(采樣距離>上限值)
CROSSED_OUT(采樣距離<下限值或采樣距離>上限值)
(5)函數一般在傳感器工作在連續測量模式初始化配置時進行使用。
9、VL53L0X_SetlnterruptThresholds()函數
(1)該函數實現測量中斷模式上下限距離值的設置
(2)函數為 VL53L0X_SetInterruptThresholds (VL53L0X_DEV Dev,VL53L0X_DeviceModes DeviceMode, FixPoint1616_t ThresholdLow,FixPoint1616_t ThresholdHigh)
(3)入口參數 VL53L0X_DEV 結構體類型變量、VL53L0X_DeviceModes 類 型變量、ThresholdLow 和 ThresholdHigh 變量,VL53L0X_DEV 結構體變量為設置傳感器 I2C 地址等重要信息,
(4) VL53L0X_DeviceModes 類型變量為設置的測量工作模式(單次測量、連續測量、定時測量等)
(5) ThresholdLow為中斷觸發的下限距離值
ThresholdHigh為設置中斷觸發的上限距離值
(6)該函數一般在傳感器工作在連續測量模式初始化配置時進行使用
10、VL53L0X_ClearInterruptMask()函數
(1)該函數實現清除測量中斷模式的中斷標志位
(2)函數為 VL53L0X_ClearInterruptMask(VL53L0X_DEV Dev,uint32_t InterruptMask)
(3)入口參數為 VL53L0X_DEV 結構體類型變量, InterruptMask 變量
(4) VL53L0X_DEV 結構體變量為設置傳感器 I2C 地址等重要信息
(5) InterruptMask 變量為設置中斷清除,默認設置為 0
(6)該函數在傳感器觸發中斷后時進行使用
11、VL53L0X_SetMeasurementTimingBudgetMicroSeconds()函數
(1)該函數實現配置測量工作模式的周期采樣時間的功能
(2)函數為 VL53L0X_SetMeasure mentTimingBudgetMicroSeconds(VL53L0X_DEV Dev, uint32_t MeasurementTimingBudget MicroSeconds)
(3)入口參數為 VL53L0X_DEV 結構體類型變量、MeasurementTimingBudget MicroSeconds 變量
(4) VL53L0X_DEV 結構體變量為設置傳感器 I2C 地址等重要信息
(5) MeasurementTimingBudgetMicroSeconds 變量為設置測量工作模式的周期采樣時間,單位為 ms
(6)該函數在工作模式初始化配置時進行使用
12、VL53L0X_PerformOffsetCalibration()函數
(1)該函數實現距離偏移的校準的功能
(2)函數為 VL53L0X_PerformOffsetCalibration VL53L0X_ DEV Dev,FixPoint1616_t CalDistanceMilliMeter, int32_t *pOffsetMicroMeter)
(3)入口參數為 VL53L0X_DEV 結構體類型變量、CalDistanceMilliMeter 變量和 pOffsetMicroMeter 指針變量, VL53L0X_DEV 結構體變量為設置傳感器 I2C 地址等重要信息
(4) CalDistanceMilliMeter變量為設置校準時與傳感器設備的相對距離值,單位為 mm
(5) pOffsetMicroMeter指針變量為相對距離校準后傳感器返回的修正距離變量的指針
(6)該函數在校準時進行使用
13、VL53L0X_SetOffsetCalibrationDataMicroMeter()函數
(1)該函數實現設置距離補償值的功能
(2)函數為 VL53L0X_SetOffsetCalibrationDataMicro Meter(VL53L0X_DEV Dev, int32_t OffsetCalibrationDataMicroMeter)
(3)入口參數為 VL53L0X_DEV 結構體類型變量和 OffsetCalibrationDataMicroMeter 變量,VL53L0X_DEV 結構體變量為設置傳 感器 I2C 地址等重要信息
(4)OffsetCalibrationDataMicroMeter 變量為設置的距離補償值
(5)該函數在補償時進行使用
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底