
ČÓ╚”Į^ī”╩ĮŠÄ┤aŲ„Ą─æ¬ė├įŁ└Ē
01Ė┼╩÷
ČÓ╚”Į^ī”╩ĮŠÄ┤aŲ„╩Ū┐╔ęįīŹ¼F┤¾┴┐│╠Ė▀Š½Č╚▌SĮŪ╬╗ęŲ£y┴┐Ą─öĄūų£yĮŪāxŲ„Ż¼▒╚å╬╚”ŠÄ┤aŲ„ČÓ┴╦ę╗éĆėøõøŠÄ┤aŲ„ą²▐D╚”öĄĄ─ėøõøŻ¼┐╔ęį░čå╬╚”ŠÄ┤aŲ„Ą─£y┴┐ĘČć·öUš╣Äū░┘╔§ų┴╔ŽŪ¦▒ČĪŻ▒Š╬─ų„ę¬╩Ū蹊┐īŹ¼FČÓ╚”Į^ī”╩ĮŠÄ┤aŲ„Ą─ÄūĘNæ¬ė├įŁ└ĒŻ¼ßśī”▓╗═¼ŅÉą═Ą─ČÓ╚”ėŗöĄįŁ└Ē┐éĮY│÷Ė„ĘNįŁ└ĒĄ─ā×╚▒³cĪŻ
é„Įy╦┼Ę■ļŖÖC╦∙┼õéõĄ─į÷┴┐╩ĮŠÄ┤aŲ„║═å╬╚”Į^ī”╩ĮŠÄ┤aŲ„ų╗─▄ūRäeę╗╚”ęįā╚Ą─╬╗ų├ą┼ŽóŻ¼į÷┴┐╩ĮŠÄ┤aŲ„į┌š²│Ż╣żū„Ū░▀ĆĄ├┤_Č©ģó┐╝³c╬╗ų├Ż¼▀@ą®Č╝ųŲ╝s┴╦Į╗┴„╦┼Ę■ļŖÖCĄ─╣żū„ą¦┬╩║═╩╣ė├ĘČć·ĪŻ┼õéõ┴╦┐╔ęįūRäeą²▐DĮŪČ╚║═▐Däė╚”öĄĄ─ČÓ╚”Į^ī”╩ĮŠÄ┤aŲ„║¾Ż¼ą┬ę╗┤·Į╗┴„╦┼Ę■ļŖÖC┐╔ęį┐╦Ę■▀@ą®Ž▐ųŲŻ¼×ķ╣żśIūįäė╗»æ¬ė├╠ß╣®┴╦Ė³×ķÅVķ¤║═ņ`╗ŅĄ─ÖCĢ■ĪŻį┌╔·«aūįäė╗»Īó▀\äė┐žųŲĪół╠ąąÖCśŗĪóÖCŲ„╚╦╝╝ągųąŻ¼Į╗┴„╦┼Ę■ļŖÖCĄ├ĄĮ┴╦ÅVĘ║Ą─æ¬ė├ĪŻ
å╬╚”Į^ī”╩ĮŠÄ┤a╩Ū░čę╗╚”ĘČć·ā╚Ą─├┐ę╗éĆĮŪČ╚▐DōQ│╔öĄ╬©ę╗öĄūų╬╗ų├ą╬╩Į▌ö│÷Ż¼Ą½ļSų°╩ął÷æ¬ė├ę¬Ū¾Ą─╠ßĖ▀Ż¼å╬╚”ŠÄ┤aŲ„ļyęįØMūŃ╚šØuųŪ─▄╗»║═ą¦┬╩╗»Ą─╣żśI┐žųŲ╩ął÷ĪŻ▒╚╚ńÖCŲ„╚╦Ż¼═©▀^ÖCŲ„╚╦Ą─£p╦┘Ų„Ż¼╦┼Ę■ļŖÖCąĶę¬▐DäėÄū╩«╚”▓┼─▄īŹ¼FÖCŲ„▒█Ą─ę╗Č©ĮŪČ╚▐DäėŻ¼į┌ÖCŲ„╚╦╔ŽļŖ║¾Ż¼╚ń╣¹┐žųŲŽĄĮyāH─▄½@Ą├å╬╚”╬╗ų├öĄō■╩Ū▓╗ūŃęį┤_Č©«öŪ░ĻP╣Ø▌SĄ─ĮŪČ╚╬╗ų├Ż¼▒žĒÜę¬▀Mąą╗ž┴Ń³c▓┘ū„Ż¼ÖCŲ„╚╦╩Ū░▓čbį┌╔·«aŠĆ╔ŽĄ─Ż¼▀@Ģ■«a╔·ć└ųžĄ─▓╗░▓╚½ę“╦žĪŻėų╚ńį┌ÖC┤▓╔ŽĄ─╦┼Ę■ļŖÖC┼õ╠ū┴╦ČÓ╚”ŠÄ┤aŲ„Ż¼į┌ÖC┤▓├┐┤╬╔ŽļŖ║¾Ż¼ŽĄĮyČ╝─▄½@╚ĪĄĮ─┐Ū░å╬╚”ųĄ║═ČÓ╚”ųĄŻ¼ų▒Įė┐╔ęį┤_Č©ĄČŠ▀─┐Ū░╦∙į┌╬╗ų├Ż¼▓╗ąĶę¬▀Mąą╗ž┴Ń³c▓┘ū„╝┤┐╔▀M╚ļ╣żū„─Ż╩ĮŻ¼┤¾┤¾╠ß╔²┴╦ÖC┤▓Ą─╩╣ė├ą¦┬╩ĪŻ
02ļŖūė╩ĮČÓ╚”Į^ī”ŠÄ┤aŲ„
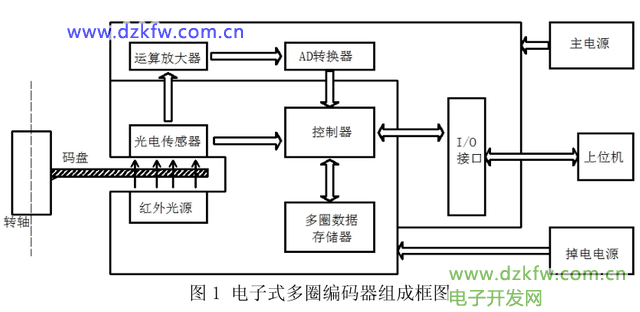
ļŖūė╩ĮČÓ╚”Į^ī”ŠÄ┤aŲ„╩Ū═©▀^░čČÓ╚”ųĄöĄō■ęįČ■▀MųŲą╬╩Į▒Ż┤µĄĮ┤µā”Ų„ųąŻ¼ŠÄ┤aŲ„į┌š²│Ż╣®ļŖĄ─Ģr║“Ż¼├┐«öČÓ╚”ųĄ░l╔·Ą─ūā╗»Č╝ąĶę¬░čČÓ╚”ųĄīæĄĮ┤µā”Ų„ųąĪŻÅ─└Ēšō╔ŽüĒšfČÓ╚”ųĄĄ─┤µā”╚▌┴┐ė╔┤µā”Ų„Ą─┤¾ąĪ╦∙øQČ©Ą─Ż¼ę▓Š═╩ŪšfČÓ╚”ųĄĄ─ėŗöĄ┴┐┐╔ęį¤oŽ▐┤¾ĪŻĄ½╩ŪļSų°ČÓ╚”ėŗöĄ╬╗Ą─į÷╝ėŻ¼ī”┤µā”Ų„Īó┐žųŲŲ„üĒšfČ╝Ģ■╠ßĖ▀╦³éāĄ─╣żū„žō║╔Ż¼═¼Ģr▀ĆĢ■į÷╝ė┴╦▌ö│÷öĄō■ļĄ─ķLČ╚Ż¼ĮĄĄ═┴╦═©ą┼ą¦┬╩Ż¼į÷╝ėöĄō■Õeš`Ą─’LļUĪŻ─┐Ū░╩ął÷╔Žų„┴„Ą─ČÓ╚”Į^ī”╩ĮŠÄ┤aŲ„═©│Ż╩╣ė├ 12 ╬╗Ż©4096Ż®ČÓ╚”ėŗöĄĪŻ
╩╣ė├ļŖūėėøæø╩ĮČÓ╚”ŠÄ┤aŲ„Ż¼ŲõČÓ╚”ųĄ░l╔·ūā╗»ĢrļŖūėŲ„╝■▀Mąą┤µā”▓┘ū„Ż¼Ą½į┌«öų„╣®ļŖļŖį┤öÓķ_║¾Ż¼╚¶ŠÄ┤aŲ„░l╔·▐Däė▓óŪę«a╔·ČÓ╚”öĄō■▀M╬╗╗“ĮĄ╬╗Ż¼ļŖūėŲ„╝■īó¤oĘ©ėøæøČÓ╚”öĄō■Ą─ūā╗»Ż¼╔ŽļŖ║¾Š═Ģ■ūx╚ĪĄĮÕeš`Ą─ČÓ╚”öĄō■Ż¼╦∙ęįąĶę¬į┌ŠÄ┤aŲ„ā╚▓┐╗“š▀═Ō▓┐╠Ē╝ėę╗éĆļŖ│ž╣®ļŖļŖį┤ĪŻį┌ų„ļŖį┤Ą¶ļŖ║¾Ż¼ų„ļŖ┬Ę▀M╚ļą▌├▀─Ż╩ĮŻ¼╣Ōį┤Īó╣ŌļŖ│ž║═┐žųŲŲ„├┐Ė¶ę╗Č©ĢrķgŻ©250msŻ®Æ▀├Ķę╗┤╬Öz£yŠÄ┤aŲ„å╬╚”╬╗ų├╩Ūʱ░l╔·ūā╗»Ż¼«öå╬╚”▓┐Ęų«a╔·┴Ń³c╠°ūāĢr▓┼Ģ■░čą┬Ą─ČÓ╚”ųĄīæ▀M┤µā”Ų„ĪŻ
ļŖūė╩ĮČÓ╚”ŠÄ┤aŲ„ĮM│╔┐“łD
ė╔ė┌ļŖūė╩ĮČÓ╚”ŠÄ┤aŲ„į┌ų„ļŖį┤öÓļŖ║¾ąĶę¬ļŖ│ž╣®ļŖŻ¼Ą¶ļŖ║¾ę╗░Ńę¬Ū¾ļŖ│ž╣®ļŖē█├³─▄▀_ĄĮ 1 ─Ļęį╔ŽŻ©īŹļH╣®ļŖĢrķgĖ∙ō■Ą¶ļŖ║¾ų„▌S▐DäėŪķør╝░ŁhŠ│£žČ╚ėą╦∙ėą▓╗═¼Ż®Ż¼▀@Š═øQČ©┴╦įō┐ŅŠÄ┤aŲ„├┐Ė¶ę╗Č©ĢrķgąĶę¬ī”Ųõ╔ŽļŖ▀Mąą│õļŖŻ¼╚¶ļŖ│žļŖ─▄═Ļ╚½║─Ą¶║¾Ż¼ŠÄ┤aŲ„ąĶę¬ųžą┬įOČ©ČÓ╚”┴Ń³cŻ¼į÷╝ė┴╦║¾Ų┌ŠSūoļyČ╚ĪŻ
03²X▌å╣ŌļŖ╩ĮČÓ╚”Į^ī”ŠÄ┤aŲ„
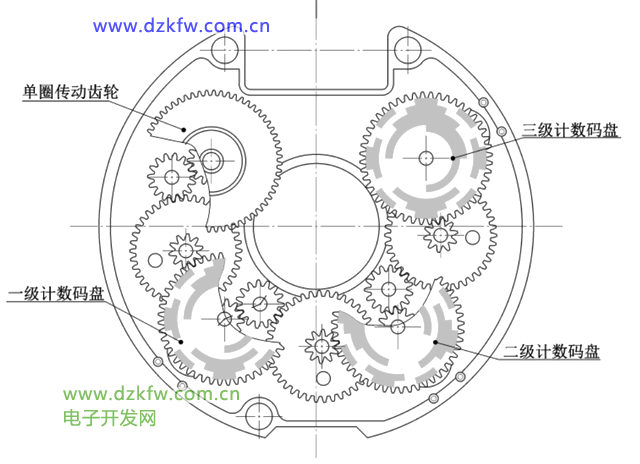
²X▌å╣ŌļŖ╩ĮČÓ╚”ŠÄ┤aŲ„╩Ūė╔ 1 éĆå╬╚”Į^ī”╩Į╣ŌļŖŠÄ┤aŲ„║═ 1 éĆČÓ╚”ėŗöĄŲ„─ŻēKĮM║ŽČ°│╔Ą─Ż¼ČÓ╚”ėŗöĄŲ„─ŻēK└’├µ░³║¼┴╦ 3 ĮMĮ^ī”╩Į╣ŌļŖŠÄ┤aŲ„Ż¼├┐ĮMŠÄ┤aŲ„─▄▌ö│÷ 4 ╬╗Į^ī”╬╗ų├ųĄŻ¼═©▀^┤«┬ōĮM║Žą╬│╔┴╦ 1 éĆ12 ╬╗Ą─ČÓ╚”ėŗöĄŲ„─ŻēKĪŻ═©▀^å╬╚”ŠÄ┤aŲ„Ą─²X▌å▐D▌S┼cČÓ╚”ėŗöĄ─ŻēKųąĄ─å╬╚”é„äė²X▌åę¦║ŽŻ¼┐╔ęįūīČÓ╚”─ŻēK┼cå╬╚”ŠÄ┤aŲ„═¼▓ĮėŗöĄĪŻ═©▀^é„äė²X▌åŻ¼├┐ĮMėŗöĄŲ„žōž¤ėŗ┴┐▓╗═¼öĄō■╬╗Ą─ČÓ╚”öĄŻ¼Ųõųą├┐ę╗╝ēėŗöĄŲ„Ą─╣ŌļŖ┤a▒P╔Ž├µ┐╠«ŗ┴╦ 4 ╬╗Ą─Č■▀MųŲĖ±└ū┤aŻ¼═¼Ģr┤a▒Pę▓╩Ūé„äė²X▌åžōž¤Ž┬╝ē┤a▒PĄ─é„äėĪŻė╔┤╦┐╔ęŖŻ¼ėŗöĄŲ„ųąĄ─╣ŌļŖ┤a▒PĄ─ųŲū„ąĶę¬ØMūŃ╣Ōį┤║═╣ŌļŖ│žĄ─═Ė╣Ō┬╩ę¬Ū¾Ż¼═¼Ģrę▓ąĶę¬ØMūŃ²X▌åé„äėĄ─ė▓Č╚ę¬Ū¾Ż¼╣╩═©│Ż▓╔ė├╣ŌīWśõų¼ū„×ķėŗöĄŲ„┤a▒P▓─┴ŽĪŻ
²X▌å╩Į╣ŌļŖČÓ╚”ėŗöĄ─ŻēK
ę╗ĪóČ■Īó╚²╝ēėŗöĄ┤a▒P╔ŽŠ∙┐╠«ŗ┴╦ 4 Śl┤aĄ└Ą─Ė±└ū┤aŻ¼ČÓ╚”ėŗöĄ─ŻēKųąĖ„┤a▒Pų«ķgĄ─é„äė▒╚ĻPŽĄ╚ńŽ┬Ż║
å╬╚”é„äė²X▌åŻ║ę╗╝ēėŗöĄ┤a▒P = 16Ż║1Ż╗
ę╗╝ēėŗöĄ┤a▒PŻ║Č■╝ēėŗöĄ┤a▒P = 16Ż║1Ż╗
Č■╝ēėŗöĄ┤a▒PŻ║╚²╝ēėŗöĄ┤a▒P = 16Ż║1Ż╗
Ė„╝ēėŗöĄ┤a▒Pų«ķgĘųäe═©▀^Ė„ūįĄ─▀^Č╔²X▌å▀_ĄĮ╔Ž╩÷é„äė▒╚ĻPŽĄÅ─Č°īŹ¼FŠÄ┤aŲ„Ą─ČÓ╚”ėŗöĄĪŻŠÄ┤aŲ„╔ŽļŖ▐DäėĢrŻ¼ČÓ╚”ėŗöĄŲ„═¼Ģr▀MąąČÓ╚”ėŗöĄ╣żū„ĪŻ«öŠÄ┤aŲ„Ą¶ļŖ▓ó░l╔·ą²▐DĢrŻ¼å╬╚”ų„▌S═©▀^²X▌å╚į╚╗ĦäėČÓ╚”ėŗöĄŲ„²X▌å▐DäėŻ¼ųžą┬╔ŽļŖūx╚ĪČÓ╚”ėŗöĄŲ„öĄō■╝┤┐╔ęį½@╚ĪĄĮš²┤_Ą─ČÓ╚”öĄō■Ż¼▓ó▓╗ąĶę¬Ņ~═Ō╠Ē╝ėļŖ│ž╣®ļŖ╝┤┐╔īŹ¼F▓╗ķgöÓČÓ╚”ėŗöĄĪŻ
04²X▌å╗¶Ā¢╩ĮČÓ╚”ŠÄ┤aŲ„
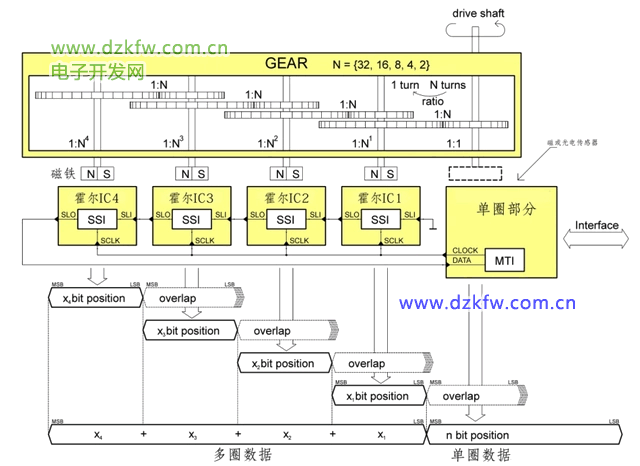
²X▌å╗¶Ā¢╩ĮČÓ╚”ŠÄ┤aŲ„╩Ūė╔ 1 éĆå╬╚”Į^ī”╩ĮŠÄ┤aŲ„║═ę╗éĆ╗¶Ā¢ČÓ╚”ėŗöĄ─ŻēKĮM│╔Ż¼╗¶Ā¢ČÓ╚”ėŗöĄ─ŻēK╩Ūė╔ 3Ī½4 ĮM╗¶Ā¢ėŗöĄŲ„ĮM│╔Ż¼├┐ĮM╗¶Ā¢ėŗöĄŲ„░³║¼ę╗éĆ┤┼ł÷ĘĮŽ“×ķÅĮŽ“Ą─╝żäŅ┤┼¾w║═ę╗éĆ▌ö│÷Į^ī”╬╗ų├ųĄĄ─╗¶Ā¢ ICĪŻå╬╚”▓┐Ęų┐╔ęį╩Ū╗¶Ā¢╗“╣ŌļŖŠÄ┤aŲ„Ż¼═©▀^Įī┘²X▌åĮMé„äė░čå╬╚”┴Ń³cĄ─▀M╬╗╗“ĮĄ╬╗é„▀fĄĮČÓ╚”ėŗöĄ─ŻēKĪŻėŗöĄ─ŻēKā╚▓┐Ą─Ė„ĮM²X▌å┐╔ęįė╔Įī┘²X▌å▀Mąą┬ōäėŻ¼╝żäŅ┤┼¾wų╗ąĶę¬░▓čbį┌²X▌å▐D▌S─®Č╦╝┤┐╔Ż¼┤¾┤¾į÷╝ė┴╦²X▌åé„äėĄ─ÅŖČ╚ĪŻ
«ö╝żäŅ┤┼¾wą²▐DĢrŻ¼╗¶Ā¢ IC ─▄Ėąæ¬ĄĮ┤┼ł÷Ą─┤┼Ž“┴┐▓ó▌ö│÷Ęųäe┼c╬╗ų├ĮŪš²ŽęĪóėÓŽęą┼╠¢│╔▒╚└²Ą─ Ux║═ Uy ļŖē║ą┼╠¢Ż¼═©▀^ Uy │²ęį UxŻ¼ätė╔Ėąæ¬ąŠŲ¼ūį╔Ēņ`├¶Č╚▓Ņ«É╗“┤┼ł÷ūā╗»ę²Ųš`▓Ņ▒╗ĄųŽ¹Ż¼─ŻöM▌ö│÷ļŖē║┤·▒ĒĄ─ĮŪČ╚┼c┤┼¾w£žČ╚║═ IC Ą─į÷ęµņ`├¶Č╚¤oĻPŻ¼╝┤ąŠŲ¼▌ö│÷ļŖē║│╔×ķĖąæ¬ąŠŲ¼Ą─Öz£yĄĮĄ─ł÷ÅŖĄ─ę╗į¬║»öĄŻ¼┤·▒Ē┤┼¾wį┌š¹éĆ 360 ĘČć·ā╚Ą─Į^ī”ÖCąĄ╬╗ų├ĪŻ▀@Š═╩Ū╗¶Ā¢Ż©┤┼Ż®ŠÄ┤aŲ„Ą─įŁ└ĒĪŻ
ČÓ╚”ėŗöĄŲ„└’├µĄ─╗¶Ā¢ėŗöĄŲ„ų«ķg═©▀^ SSI ┤«ąą▀BĮėŻ¼├┐ĮM╗¶Ā¢ėŗöĄŲ„─▄╔·│╔ 4Ī½8 ╬╗Į^ī”╬╗ų├ųĄŻ¼═©▀^ SSI ┤«┐┌å╬╚”ŽĄĮy┐╔ęį½@╚Ī├┐ĮMėŗöĄŲ„«öŪ░Ą─╬╗ų├ųĄ▓ó▀MąąĮM║ŽŻ¼Ą├ĄĮ«öŪ░ČÓ╚”ųĄĪŻå╬╚”ŽĄĮy▓┐ĘųīóĄ├ĄĮĄ─ČÓ╚”ųĄ┼cūį╔ĒĄ─å╬╚”öĄō■▀MąąĮM║Ž▌ö│÷Ż¼īŹ¼FČÓ╚”Į^ī”╩ĮŠÄ┤aŲ„Ą─╣”─▄ĪŻ
²X▌å╩ĮČÓ╚”┤┼ėŗöĄŲ„įŁ└Ē║═öĄō■Ė±╩Į
ČÓ╚”ėŗöĄ─ŻēK╩Ūė╔Ė„ĮM╗¶Ā¢ėŗöĄ┬ōäėĮM║ŽČ°│╔Ą─Ż¼┼cå╬╚”▓┐ĘųĄ─┬ōäėę▓╩Ū═©▀^²X▌åę¦║ŽŻ¼▓ó▓╗╩▄ļŖį┤Ą─ĀŅæB╦∙ė░ĒæŻ¼öÓļŖ║¾å╬╚”▓┐ĘųĄ─▐Däė╚į╚╗─▄ĦäėČÓ╚”ėŗöĄŲ„╣żū„Ż¼├┐┤╬╔ŽļŖ║¾ų╗ąĶę¬ųžą┬ūx╚ĪėŗöĄŲ„«öŪ░Ą─Į^ī”╬╗ų├ųĄ╝┤┐╔Ą├ĄĮš²┤_Ą─ČÓ╚”ųĄöĄō■Ż¼═¼śėīŹ¼F▓╗ķgöÓČÓ╚”ėŗöĄĪŻ
05┐éĮY
─┐Ū░╩ął÷╔Ž┤¾ČÓ╣żśIė├Ą─ČÓ╚”Į^ī”╩ĮŠÄ┤aŲ„╩╣ė├╔Ž╩÷╚²┐ŅČÓ╚”ėŗöĄįŁ└ĒŻ¼╚²ĘNČÓ╚”ėŗöĄįŁ└ĒĖ„ėąā×╚▒³cĪŻļŖūė╩ĮČÓ╚”ėŗöĄŲ„Š▀ėąĮYśŗ║åå╬ĪóėŗöĄĘČć·ÅVĪóųŲū„│╔▒ŠĄ═Ą─ā׳cŻ¼Ą½ėąąĶę¬═Ō╝ėļŖ│žĪó║¾Ų┌ŠSūoÅ═ļsĄ─╚▒³cŻ╗²X▌å╩Į╣ŌļŖČÓ╚”ėŗöĄŲ„Š▀ėąėŗöĄ£╩┤_Īó┐╔┐┐ąįĖ▀ĪóŠSūo║åå╬Ą─ā׳cŻ¼Ą½ėąśõų¼²X▌åęūōpē─ĪóųŲū„│╔▒ŠĖ▀Ą─╚▒³cŻ╗²X▌å╩Į╗¶Ā¢ČÓ╚”ėŗöĄŲ„Š▀ėąėŗöĄ£╩┤_Īó┐╔┐┐ąįĖ▀Īó│╔▒Šę¬▒╚²X▌å╣ŌļŖ╩Įꬥ═Īó║¾Ų┌╚▌ęūŠSūoĪó▓╗ąĶ═ŌĮėļŖ│žĪó²X▌å▓╗ęūōpē─Ą╚ā׳cŻ¼╩Ūą┬ą═ČÓ╚”Į^ī”╩ĮŠÄ┤aŲ„Ą─└ĒŽļ▀xą═ĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū