
HC-SR04│¼┬Ģ▓©£yŠÓ─ŻēKĄ─Įė┐┌Č©┴x

HC-SR04│¼┬Ģ▓©£yŠÓ─ŻēKĄ─öĄō■Įė┐┌╚ń╔ŽłDŻ¼┼cArduino unoĄ─Įė┐┌▀BĮėĘĮĘ©Ż║VCCĮė+5VŻ¼GNDĮėĄžŻ¼TrigĮėöĄūųI/OĮė┐┌5Ż©ę▓┐╔ęį╩ŪŲõ╦³Ż®Ż¼EchoĮėöĄūųI/OĮė┐┌4Ż©ę▓┐╔ęį╩ŪŲõ╦³Ż®ĪŻ╚╗║¾┤“ķ_arduino IDE ╔Žé„┤·┤aŻ║
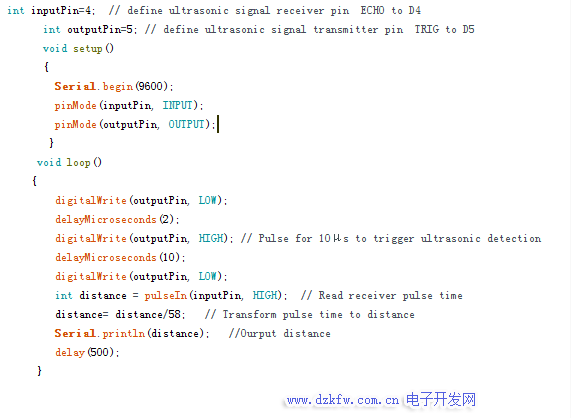
HC-SR04Ą─£yįć│╠ą“
int inputPin=4; // define ultrasonic signal receiver pin ECHO to D4
int outputPin=5; // define ultrasonic signal transmitter pin TRIG to D5
void setup()
{
Serial.begin(9600);
pinMode(inputPin, INPUT);
pinMode(outputPin, OUTPUT);
}
void loop()
{
digitalWrite(outputPin, LOW);
delayMicroseconds(2);
digitalWrite(outputPin, HIGH); // Pulse for 10”╠s to trigger ultrasonic detection
delayMicroseconds(10);
digitalWrite(outputPin, LOW);
int distance = pulseIn(inputPin, HIGH); // Read receiver pulse time
distance= distance/58; // Transform pulse time to distance
Serial.println(distance); //Ourput distance
delay(500);
}
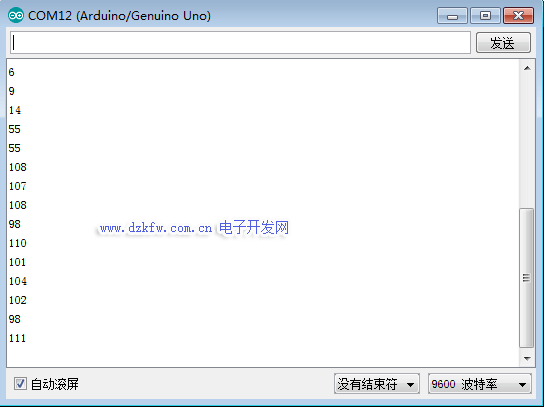
HC-SR04Ą─£yįćĮY╣¹
HC-SR04│¼┬Ģ▓©£yŠÓ─ŻēKĄ─╣żū„įŁ└Ē
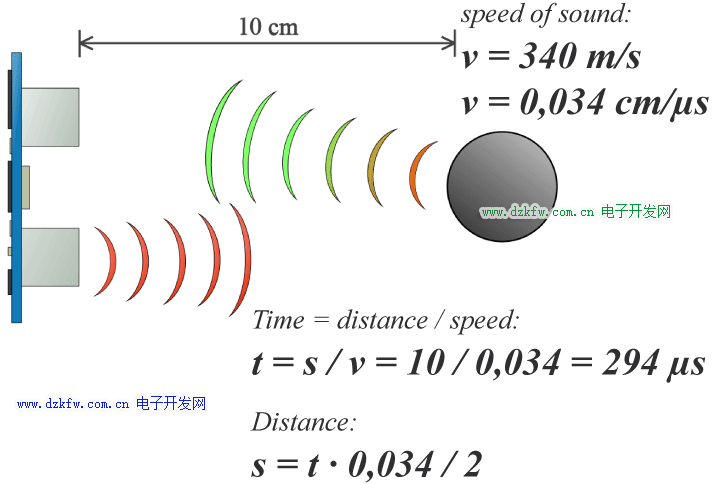
(1)▓╔ė├IOė|░l£yŠÓŻ¼Įoų┴╔┘10usĄ─Ė▀ļŖŲĮą┼╠¢;
(2)─ŻēKūįäė░l╦═8éĆ40khzĄ─ĘĮ▓©Ż¼ūįäėÖz£y╩Ūʱėąą┼╠¢ĘĄ╗žŻ╗
(3)ėąą┼╠¢ĘĄ╗žŻ¼═©▀^IO▌ö│÷ę╗Ė▀ļŖŲĮŻ¼Ė▀ļŖŲĮ│ų└mĄ─ĢrķgŠ═╩Ū│¼┬Ģ▓©Å─░l╔õĄĮĘĄ╗žĄ─ĢrķgŻ«£yįćŠÓļx=(Ė▀ļŖŲĮĢrķg*┬Ģ╦┘(340M/S))/2;
(4)╗žĒæą┼╠¢Ą─├}ø_īÆČ╚┼c╦∙£yĄ─ŠÓļx│╔š²▒╚ĪŻė╔┤╦═©▀^░l╔õą┼╠¢ĄĮ╩šĄĮĄ─╗žĒæą┼╠¢ĢrķgķgĖ¶┐╔ęįėŗ╦ŃĄ├ĄĮŠÓļxĪŻ╣½╩ĮŻ║uS/58=└Õ├ū╗“š▀uS/148=ėó┤ńŻ╗╗“╩ŪŻ║ŠÓļx=Ė▀ļŖŲĮĢrķg*┬Ģ╦┘Ż©340M/SŻ®/2Ż╗Į©ūh£y┴┐ų▄Ų┌×ķ60ms ęį╔ŽŻ¼ęįĘ└ų╣░l╔õą┼╠¢ī”╗žĒæą┼╠¢Ą─ė░ĒæĪŻ
īŻŅ}Ż║│¼┬Ģ▓©£yŠÓ─ŻēKŻ║
- HC-SR04│¼┬Ģ▓©£yŠÓ─ŻēKĄ─£yįć
- SRF02│¼┬Ģ▓©£yŠÓ─ŻēKĄ─▀BĮė
- KS103£yŠÓ─ŻēK║▄┼Ż
- į┌śõ▌«┼╔╔Ž£yįćĘ└╦«ą═│¼┬Ģ▓©£yŠÓ─ŻēK
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū