
1íó¥wıô
▀@ã¬╬─ı┬╩ÃÖCðÁ▒█îúÖ┌Á─Á┌Ê╗ã┌ú¼Èô╬─ı┬Í╝È┌îªÖCðÁ▒█╗¨ÁA(ch¿│)ͬÎR▀Mðð║åʬÁ─©┼╩÷ú¼×ÚÍ«║¾ÖCðÁ▒█Á─▀\äËîW(xu¿ª)║═äË┴ªîW(xu¿ª)À┬ıµÎ÷║├õüë|íúÈôã¬╬─ı┬Í╗▀Mððı¹¾wÁ─ͬÎR╝▄ÿï(g¿░u)╩ß└Ý║═¥▀¾wͬÎRÁ─║åʬ¢Ú¢Bú¼▓ó▓╗ò■▀^ÂÓ╔¯╚Ùú¼ãõÍðâ╚(n¿¿i)╚¦Í¸Ê¬üÝÈ┤┼cJohn J. Craig Á─Í°├¹Í°Î¸íÂÖCã¸╚╦îW(xu¿ª)îº(d¿úo)ıôíÀú¼ıêðÞʬîW(xu¿ª)┴ò(x¿¬)ÖCðÁ▒█Á─═¼îW(xu¿ª)ƒo▒╚╩ýÎxÈôò°íú
╩Τ╚¢Ú¢BÊ╗¤┬╬Êîóʬ¢Ú¢BÁ─͸ʬͬÎR³cú¼┐ıÚg├Þ╩÷┼cÌD(zhu¿ún)ôQíóÖCðÁ▒█▀\äËîW(xu¿ª)íóÖCðÁ▒█╦┘Â╚┼cýo┴ªíú
×Ú╩▓├┤ʬîW(xu¿ª)┴ò(x¿¬)┐ıÚg├Þ╩÷┼cÌD(zhu¿ún)ôQ─Ïú¼╬Êéâ┐╔ÊÈ┐┤¤┬êDú¼ÖCðÁ▒█╩Ã╚¶©╔éÇùU▀B¢Ë°ð╬│╔Á─ú¿▀B¢Ëâ╔éÇùUÁ─ÁÏÀ¢╩ÃÛP(gu¿ín)╣Ø(ji¿ª)ú®ú¼Â°È┌ÖCðÁ▒█Íð▀@ð®ùUÀQ×Ú▀BùUú¼├┐éÇ▀BùU┐╔ÊÈÈ┌À‗▀BùUú¿╔¤Ê╗▀BùUú®Á─╗¨ÁA(ch¿│)╔¤└@─│Ê╗¦Sð²ÌD(zhu¿ún)ú¼ú¿ÛP(gu¿ín)╣Ø(ji¿ª)═¿▀^ÙèÖCð²ÌD(zhu¿ún)ĺäË▀BùUð²ÌD(zhu¿ún)ú®ú¼Â°▀@éǦSÍ╗┼cÀ‗▀BùU¤Ó¹Í╣ú¼▀@¥═îº(d¿úo)Í┬Ê╗Á®ÂÓéÇ▀BùUÂ╝▀Mðð▀\äËòrú¼▀BùUÍ╗─▄┼cí░╔¤Ê╗╝ë▀BùUí▒║═í░¤┬Ê╗╝ë▀BùUí▒▀MððÍ▒¢ËÁ─┐ıÚgÌD(zhu¿ún)ôQÛP(gu¿ín)¤Áú¼Ê▓¥═╩Ãıf«ö(d¿íng)╬ÊͬÁ└Á┌Ê╗éÇ▀BùUð²ÌD(zhu¿ún)Á─¢ÃÂ╚òrú¼╬Ê¥═─▄©¨ô■(j¿┤)ÁÎΨÁ─┐ıÚgΰÿ╦(bi¿ío)═ã╦Ò│÷Á┌Ê╗éÇ▀BùUÁ─¥▀¾w╬╗Í├ú¼╚╗║¾Ê╗╝ëÊ╗╝ë═¨║¾═ã¥═─▄½@Á├ί─®Â╦ÖCðÁ▒█Á─╬╗Í├ú¼Ê▓¥═╩âËðÂ▒╚─®Â╦╬╗Í├íú°┐ıÚg├Þ╩÷║═ÌD(zhu¿ún)ôQ¥═╩ÃîW(xu¿ª)┴ò(x¿¬)╚þ║╬Ê╗╝ëÊ╗╝ëËï╦Ò┐ıÚgΰÿ╦(bi¿ío)ú¼Ê▓¥═╩ÃîW(xu¿ª)┴ò(x¿¬)Å─╣╠¿Á─ÁÎΨÚ_╩╝ú¼┐ıÚgòr╚þ║╬═¿▀^▀BùUð²ÌD(zhu¿ún)Ê╗▓¢Ê╗▓¢ÌD(zhu¿ún)ôQÁ─íú

ÖCðÁ▒█▀\äËîW(xu¿ª)¥═║▄║├└Ý¢Ô┴╦ú¼├µîªÖCðÁ▒█ú¼╬Êéâ┐¤Â¿╩ÃÐð¥┐╚þ║╬╩╣Á├ÖCðÁ▒█░┤ıı╬ÊéâÊÔÈ©╚Ñ▀\äËú¼╚þ║╬┐ÏÍãÖCðÁ▒█─®Â╦Á─╬╗Í├íú▒╚╚þË├ÖCðÁ▒█─├▒¡ÎËú¼┐¤¤╚ʬ┐ÏÍã─®Â╦Á¢▀_▒¡ÎË╬╗Í├ú¼╦¨ÊÈ▀@└´¥═ÈO(sh¿¿)ËïÁ¢▀\äËîW(xu¿ª)ͬÎRú¼ÀÍ×Úı²▀\äËîW(xu¿ª)║═─µ▀\äËîW(xu¿ª)ú¼ı²▀\äËîW(xu¿ª)¥═╩ÃÊÐͬ├┐éÇÛP(gu¿ín)╣Ø(ji¿ª)ÙèÖCÁ─ð²ÌD(zhu¿ún)¢ÃÂ╚ú¼═ã╦Ò│÷─®Â╦╣ñ¥▀Á─┐ıÚg╬╗Î╦ú¿▀@└´Á─╬╗Î╦ãõîì¥═╩Ã┐ıÚg╬╗Í├╝Ë╔¤┐ıÚg│»¤‗ú®íú─µ▀\äËîW(xu¿ª)¥═╩ÃÊÐͬ╬Ê─®Â╦┐ıÚg╬╗Í├ú¼═ã╦Ò│÷©¸éÇÛP(gu¿ín)╣Ø(ji¿ª)Á─¢ÃÂ╚ú¼▀@¥═¯É╦ãË┌─├▒¡ÎËú¼╬ÊͬÁ└▒¡ÎË╬╗Í├ú¼ðÞʬ═ã╦Ò│÷─®Â╦╣ñ¥▀Á¢▀_Èô╬╗Í├ðÞʬ├┐éÇÛP(gu¿ín)╣Ø(ji¿ª)ð²ÌD(zhu¿ún)ÂÓ┤¾¢ÃÂ╚íú
ÖCðÁ▒█╦┘Â╚┼cýo┴ªú¼¥═╔µ╝░Á¢äË┴ªîW(xu¿ª)ͬÎRú¼╩Τ╚îW(xu¿ª)┴ò(x¿¬)ÖCðÁ▒█╦┘Â╚ú¼╩Ã×Ú┴╦├Þ╩÷├┐éÇ▀BùU¥Ç╦┘Â╚║═¢Ã╦┘Â╚╩Ã╚þ║╬é¸▀fÁ─ú¼ãõÍð▒╚¦^͸ʬÁ─ͬÎR³c¥═╩ÃÐ┼┐╔▒╚¥ÏÛçú¼Èô¥ÏÛç├Þ╩÷┴╦├┐éÇÛP(gu¿ín)╣Ø(ji¿ª)╦┘Â╚┼c─®Â╦Á─╬╗Î╦╦┘Â╚íú°ÖCðÁ▒█ýo┴ª¥═╔µ╝░Á¢ÖCðÁ▒█äË┴ªîW(xu¿ª)ͬÎRú¼Í¸Ê¬ÍvÁ─╩ÃÖCðÁ▒█È┌─│éÇÎ╦æB(t¿ñi)©¸ÛP(gu¿ín)╣Ø(ji¿ª)ÊÈ╦┘Â╚íó╝Ë╦┘Â╚▀\äËòrú¼ÛP(gu¿ín)╣Ø(ji¿ª)ÙèÖCðÞʬ¦ö│÷Á─┴ª¥Ïú¼╚þ╣¹─®Â╦îª═Ô¢þ╩®╝Ë┴ªú¼▀@└´▀ÇðÞʬ╝Ë╚Ù╩®╝Ë┴ªÀ┤θË├È┌©¸éÇÛP(gu¿ín)╣Ø(ji¿ª)Á─┴ª¥Ïíú
2íó┐ıÚg╬╗Í├íóÎ╦æB(t¿ñi)┼c╬╗Î╦Á─├Þ╩÷
2.1ú¼╬╗Í├▒Ý╩¥
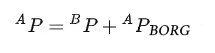
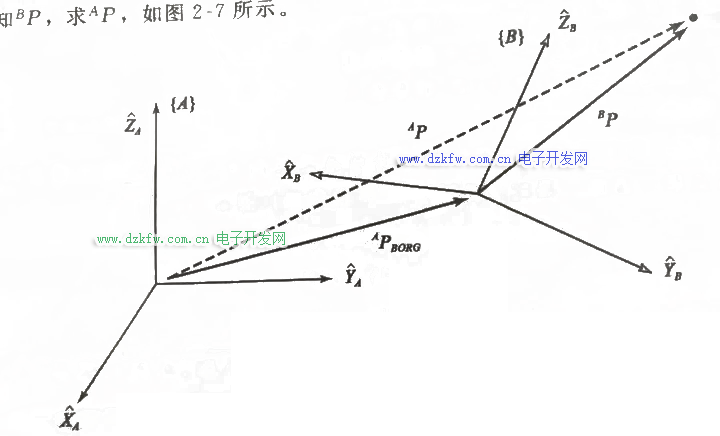
«ö(d¿íng)╬ÊéâîªÖCðÁ▒█¢¿┴óΰÿ╦(bi¿ío)¤Áòrú¼═¨═¨îóÁÎΨθ×Ú╗¨£╩(zh¿│n)ΰÿ╦(bi¿ío)¤Áú¼êDÍðΰÿ╦(bi¿ío)¤ÁA(ch¿│)▒Ò╩Ã╗¨£╩(zh¿│n)ΰÿ╦(bi¿ío)¤Áú¼¥═─▄Ë├Ê╗éÇ3\times1Á─╬╗Í├╩©┴┐¢o│÷ΰÿ╦(bi¿ío)¤ÁÍðÁ─╚╬║╬³c¿╬╗íú▀ÇʬÎóÊÔ╩©┴┐¿┴xÈ┌──Ê╗éÇΰÿ╦(bi¿ío)¤Áíú^AP╩ÃÍ©¤ÓîªÎ°ÿ╦(bi¿ío)¤ÁA(ch¿│)Á─Ê╗édzcÁ─╬╗Í├íú

╩└¢þΰÿ╦(bi¿ío)¤ÁÍðÁ─╚╬║╬³cÂ╝┐╔ÊÈË├Ê╗éÇ3í┴1Á─╬╗Í├╩©┴┐▀Mðð¿╬╗ú¼└²╚þú║
2.2íó╬╗Î╦▒Ý╩¥
▓╗âHðÞʬ▒Ý╩¥┐ıÚgÍðÁ─³cÁ─╬╗╬╗Í├ú¼▀ÇðÞʬ├Þ╩÷╬´¾wÁ─Î╦æB(t¿ñi)ú¼Ê▓¥═╩ÃÈô³c│÷╬´¾wÁ─À¢¤‗íú╔¤êD┤_¿┴╦▓┘θ▒█─®Â╦╬╗Í├ú¼╚¶Î╦æB(t¿ñi)Ê▓┤_¿ú¼─®Â╦Á─╬╗Î╦¥═─▄═Û╚½▒╗┤_¿¤┬üÝíú×Ú┴╦├Þ╩÷╬´¾wÁ─Î╦æB(t¿ñi)ú¼╬ÊéâÈ┌╬´¾w╔¤╣╠¿Ê╗éÇΰÿ╦(bi¿ío)¤Á▓óÃÊ¢o│÷┤╦ΰÿ╦(bi¿ío)¤Á¤ÓîªË┌àó┐╝ΰÿ╦(bi¿ío)¤ÁÁ─├Þ╩÷íú╚þ¤┬êDÁ─àó┐╝¤ÁB╝┤×Ú╣╠¿È┌╬´¾w╔¤Á─íú
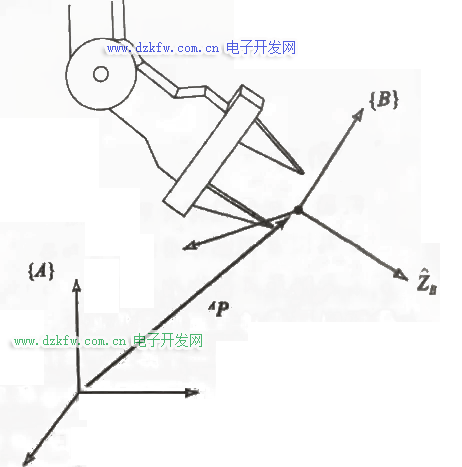
Ë├XB,YB,ZBüÝ▒Ý╩¥Î°ÿ╦(bi¿ío)¤Á{B}©¸Í¸¦SÀ¢¤‗Á─å╬╬╗╩©┴┐ú¼«ö(d¿íng)Ë├ΰÿ╦(bi¿ío)¤Á{A}üÝ▒Ý╩¥òrú¼╦³éâ▒╗îæ│╔AXB,AYB,AZBú¼îó╚²éÇå╬╬╗╩©┴┐░┤AXB,AYB,AZBÝÿð‗┼┼┴ð¢M│╔Ê╗éÇ3í┴3Á─¥ÏÛçú¼ÀQÍ«×Úð²ÌD(zhu¿ún)¥ÏÛçú¼Ë├À¹╠ûABRüÝ▒Ý╩¥íú
Ëð┴╦╬╗Î╦Á─├Þ╩÷ú¼╬Êéâ¥═─▄ͬÁ└Ê╗éÇ▀BùU─®Â╦Ê▓¥═╩ÃÛP(gu¿ín)╣Ø(ji¿ª)¤ÓîªË┌╔¤Ê╗ÛP(gu¿ín)╣Ø(ji¿ª)Á─╬╗Î╦ú¼Ê└┤╬├Þ╩÷ί║¾¥═─▄½@Á├─®Â╦╬╗Î╦íú╚þêD╦¨╩¥ú¼╝t╔½▒Ý╩¥▀BùUú¼░Î╔½▒Ý╩¥ÛP(gu¿ín)╣Ø(ji¿ª)╠Äú¼├┐éÇÛP(gu¿ín)╣Ø(ji¿ª)╠Ä¥═┤·▒ÝÊ╗éÇΰÿ╦(bi¿ío)¤Áú¼═¿▀^ΰÿ╦(bi¿ío)¤ÁÁ─▀f═ãËï╦Òú¼¥═─▄╦Ò│÷─®Â╦ΰÿ╦(bi¿ío)¤Á¤Óîª╗¨£╩(zh¿│n)ΰÿ╦(bi¿ío)¤ÁÁ─╬╗Î╦íú
¢Ë¤┬üÝ¥═òr╚þ║╬Ëï╦Òΰÿ╦(bi¿ío)¤ÁÁ─╬╗Î╦íú
2.3 ΰÿ╦(bi¿ío)¤Áã¢Êã
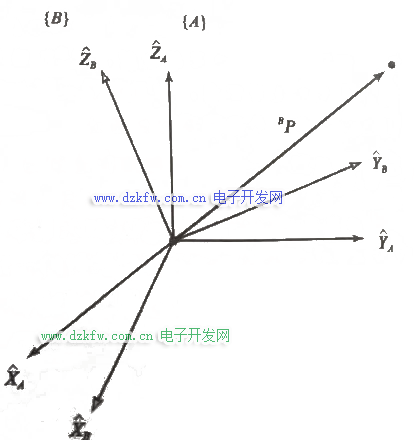
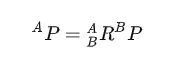
┐╔ÊÈÅ─êDÍð┐┤│÷ú¼Bΰÿ╦(bi¿ío)¤Á¥═╩äÓîªAΰÿ╦(bi¿ío)¤Á▀Mððã¢Êã
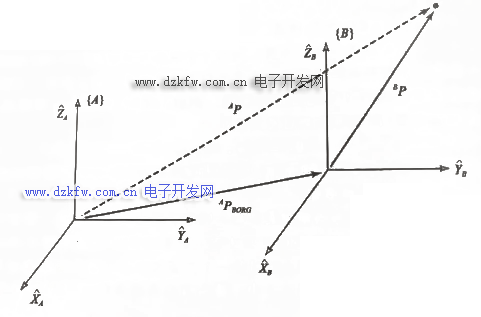
┤╦òrú¼╬ÊéâË├╩©┴┐¤Ó╝ËÁ─ÌkÀ¿Ã¾³cP¤ÓîªË┌AÁ─▒Ý╩¥^APú║
2.4 ΰÿ╦(bi¿ío)¤Áð²ÌD(zhu¿ún)
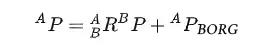
╚¶╬ÊéâÊÐͬ╩©┴┐¤ÓîªË┌BÁ─¿┴x^BPú¼¼F(xi¿ñn)È┌¤Ùþ╩©┴┐¤ÓîªË┌AÁ─¿┴xú¼ÃÊâ╔éÇΰÿ╦(bi¿ío)¤ÁÈ¡³cÍÏ║¤ú¼╬ÊéâÊÐͬ^A_BRú¼─Ã├┤╬Êéâ╩Ã┐╔ÊÈþ¢ÔÁ─íú
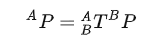
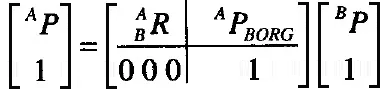
Èô╩¢┐╔║å╗»×Úð²ÌD(zhu¿ún)¥ÏÛçð╬╩¢▒Ý╩¥ú║
Ëð┴╦¥Ïΰÿ╦(bi¿ío)¤ÁÁ─ã½Êã║═ð²ÌD(zhu¿ún)ú¼╬Êéâ¥═┐╔ÊÈ©¨ô■(j¿┤)╗¨£╩(zh¿│n)ΰÿ╦(bi¿ío)¤Á═ã╦Ò│÷▀B¢Ë▀BùUÁ─ΰÿ╦(bi¿ío)¤Áíú
╚þêD╦¨╩¥×Úâ╔éÇΰÿ╦(bi¿ío)¤ÁËð¤ÓîªÁ─ã½Êã║═ð²ÌD(zhu¿ún)ú¼Ë┌╩Ã¥═Ëðú║
°▀@ÿË▒Ý╩¥â╔éÇΰÿ╦(bi¿ío)¤ÁÁ─ÛP(gu¿ín)¤Á¥═´@Á├║▄┬Úƒ®ú¼Ë┌╩Ã═¿▀^¿┴xÌD(zhu¿ún)ôQ╦ÒÎËüÝÀ¢▒Ò├Þ╩÷ú║
Ë┌╩Ã╬Êéâ¥═┐╔ÊÈ═¿▀^ÌD(zhu¿ún)ôQ╦ÒÎËüÝ├Þ╩÷â╔éÇΰÿ╦(bi¿ío)¤ÁÁ─ÛP(gu¿ín)¤Áú¼═¼ÿËÌD(zhu¿ún)ôQ╦ÒÎË╩Ã┐╔ÊÈ»B╝ËÁ─ú¼═¿▀^▓╗öÓÁ─»B╝Ë¥═┐╔ÊÈ╦Ò│÷─®Â╦┼c╗¨£╩(zh¿│n)ΰÿ╦(bi¿ío)¤ÁÁ─ÌD(zhu¿ún)ôQ╦ÒÎËú¼Ê▓¥═╩ÃÁ├Á¢─®Â╦¤ÓîªË┌╗¨£╩(zh¿│n)ΰÿ╦(bi¿ío)¤ÁÁ─╬╗Î╦íú
3 íóÖCðÁ▒█▀\äËîW(xu¿ª)
3.1íó▀BùU▒Ý╩¥
╩Τ╚îW(xu¿ª)┴ò(x¿¬)ÖCðÁ▒█▀\äËîW(xu¿ª)ú¼¥═ðÞʬ┴╦¢ÔÖCðÁ▒█Á─¢Y(ji¿ª)ÿï(g¿░u)ú¼▀BùU┼c▀BùUÍ«ÚgÁ─ΰÿ╦(bi¿ío)¤Á╩Ã╚þ║╬ÎâôQÁ─ú¼╩Ã╚þ║╬ã¢Êãú¼╚þ║╬ð²ÌD(zhu¿ún)ú¼╩╣Á├─│Ê╗▀BùUΰÿ╦(bi¿ío)¤Á░┤ıı▀@éÇã¢Êãð²ÌD(zhu¿ún)Í«║¾─▄ë‗½@Á├¤┬Ê╗éÇ▀BùUÁ─ΰÿ╦(bi¿ío)¤Áú¼Ê▓╝┤╩Ãâ╔éÇ▀BùUÍ«ÚgÁ─ΰÿ╦(bi¿ío)¤Á╦ÒÎË┼c▀BùU¢Y(ji¿ª)ÿï(g¿░u)Á─ÛP(gu¿ín)¤Áú¼©³Í▒░ÎÁ─ÊÔ╦╝¥═╩Ãú¼╚þ╣¹Í¬Á└─│Ê╗ÛP(gu¿ín)╣Ø(ji¿ª)Á─¢ÃÂ╚ú¼¥═─▄ıÊÁ¢ÛP(gu¿ín)╣Ø(ji¿ª)▀B¢ËÁ─â╔éÇ▀BùUΰÿ╦(bi¿ío)¤ÁîªË┌Á─ÎâôQ╦ÒÎËTíú
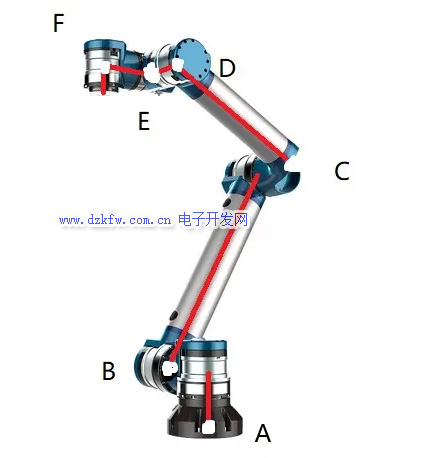
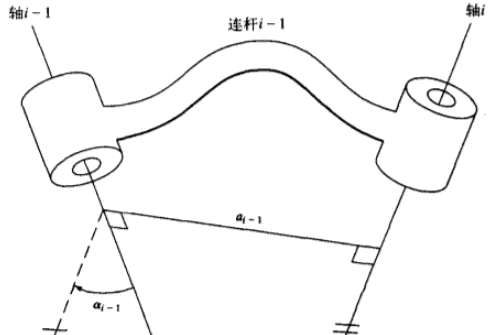
│úÊèÁ─▓┘θ▒█Á─¢Y(ji¿ª)ÿï(g¿░u)Ê╗░Òâ×(y¿¡u)¤╚▀xô±Í╗ËðÊ╗éÇÎÈË╔Â╚Á─ÛP(gu¿ín)╣Ø(ji¿ª)θ×Ú▀BùUÁ─▀B¢ËÀ¢╩¢ú¼┤¾▓┐ÀÍÁ─▓┘θ▒█Íðò■░³└¿ÌD(zhu¿ún)äËÛP(gu¿ín)╣Ø(ji¿ª)║═ÊãäËÛP(gu¿ín)╣Ø(ji¿ª)íúÍ╗Ëð║▄╔┘ÊèÁ─ÃÚørú¼ò■╩╣Ë├¥▀ËðnéÇÎÈË╔Â╚Á─ÛP(gu¿ín)╣Ø(ji¿ª)ú¼▀@ÀNÛP(gu¿ín)╣Ø(ji¿ª)Ê▓┐╔ÊÈ│Ú¤¾Á─┐┤Î÷Ë├néÇå╬ÎÈË╔Â╚Á─ÛP(gu¿ín)╣Ø(ji¿ª)┼cn-1éÇÚLÂ╚Á─▀BùU¢M║¤Â°│╔Á─íú
╬ÊéâÈ┌Ëæıô▓┘θ▒█òrú¼ò■Å─╣╠¿╗¨Î¨Ú_╩╝×Ú▀BùU¥Ä╠ûú¼╬Êéâ┴ò(x¿¬)æTðÈÁÏ│╔╣╠¿╗¨Î¨×Ú▀BùU0ú¼¢Ë¤┬üÝÁ─Á┌Ê╗éÇ─▄äËÁ─▀BùU▒╗ÀQ×Ú▀BùU1ú¼ÊÈ┤╦¯É═ãú¼Î¯─®Â╦Á─Á─▀BùU¥═ÀQ×Ú▀BùUn
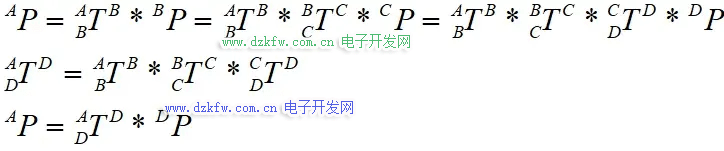
╔¤êD¥═╩ÃÊ╗ÀN▀BùU├Þ╩÷À¢╩¢ú¼Ë├╦─éÇàóöÁ(sh¿┤)├Þ╩÷â╔éÇ▀BùUÁ─¤Óîª╬╗Î╦ÛP(gu¿ín)¤Áú║
Ê▓¥═╩Ã╚þ╔¤ÀÍ╬÷ú¼Í¬Á└â╔éÇ▀BùUÁ─¥▀¾w¤Óîª╬╗Î╦ÛP(gu¿ín)¤Á║¾ú¼¥═─▄═ã╦Ò│÷â╔éÇ▀BùUΰÿ╦(bi¿ío)¤ÁÁ─ÌD(zhu¿ún)ôQ╦ÒÎËTú║
▀@ÿËú¼Í╗ʬ╬ÊͬÁ└├┐éÇ▀BùU¤ÓîªÛP(gu¿ín)¤Áú¼¥═─▄═ã╦Ò│÷ÖCðÁ▒█─®Â╦¤Óîª╗¨£╩(zh¿│n)ΰÿ╦(bi¿ío)Á─ÌD(zhu¿ún)ôQ╦ÒÎËú¼Ê▓¥═╩Ã─▄ë‗Á├Á¢─®Â╦¤Óîª╗¨£╩(zh¿│n)ΰÿ╦(bi¿ío)¤ÁÁ─╬╗Í├║═á¯æB(t¿ñi)íú
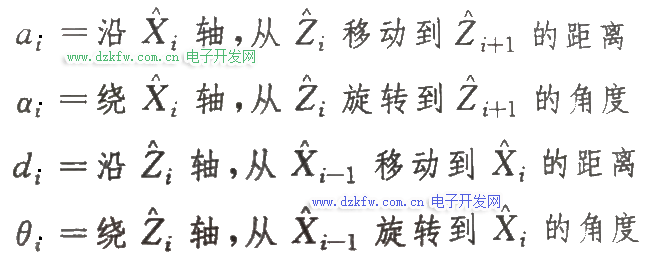
3.2íó▀\äËîW(xu¿ª)È¡└Ý
È┌▀@éÇ▀BùUÛP(gu¿ín)¤ÁÍðú¼ËðÊ╗éÇàóöÁ(sh¿┤)ª╚ú¼╦¹╩ÃäËæB(t¿ñi)Îâ╗»Á─ú¼¥═╩Ããõ╦¹╚²éÇàóöÁ(sh¿┤)╩Ã▓╗ò■Îâ╗»ú¼Â°ÈôàóöÁ(sh¿┤)ª╚¥═╩ÃÛP(gu¿ín)╣Ø(ji¿ª)ð²ÌD(zhu¿ún)¢ÃÂ╚ú¼╦¨ÊÈ╬Êéâ¥═─▄©¨ô■(j¿┤)├┐éÇÛP(gu¿ín)╣Ø(ji¿ª)ð²ÌD(zhu¿ún)¢ÃÂ╚═ã╦Ò│÷ÖCðÁ▒█─®Â╦¤Óîª╗¨£╩(zh¿│n)ΰÿ╦(bi¿ío)¤ÁÁ─ÎâôQ╦ÒÎËú¼Å─°Á├Á¢ÖCðÁ▒█─®Â╦Á─╬╗Î╦ú¼▀@¥═╩Ãı²▀\äËîW(xu¿ª)íú
«ö(d¿íng)╬ÊéâͬÁ└─®Â╦╬╗Î╦òrú¼¤ú═¹ÖCðÁ▒█─▄▀_Á¢Èô╬╗Í├ú¼¥═╩Τ╚═ã╦Ò╠ÄÈôÎâôQ╦ÒÎËÛP(gu¿ín)Ë┌ª╚Á─╣½╩¢ú║
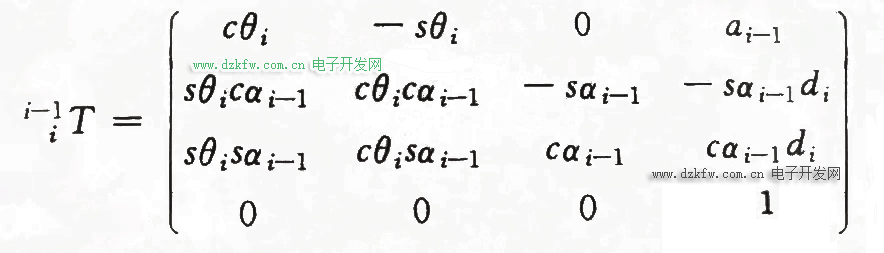
╚╗║¾ËðÊÐͬÁ─╗¨£╩(zh¿│n)ΰÿ╦(bi¿ío)¤Á╬╗Î╦║═─®Â╦╬╗Î╦▀Mðð¥ÏÛç▀\╦ÒÁ─¥▀¾wàóöÁ(sh¿┤) Tú¼╚╗║¾▀MððÀ¢│╠þ¢Ôú¼Á½╩Ã─µ▀\äËîW(xu¿ª)Á─þ¢ÔÙyÂ╚ò■ÙSÍ°ÖCðÁ▒█ÛP(gu¿ín)╣Ø(ji¿ª)öÁ(sh¿┤)┴┐Á─ÎâôQ│╔ÄÎ║╬▒ÂÈ÷íú
┤¾©┼Á─▀\äËîW(xu¿ª)ͬÎR³c¥═Ív¢ÔÁ¢▀@└´ú¼ËðÛP(gu¿ín)äË┴ªîW(xu¿ª)ͬÎRò■È┌Í«║¾äË┴ªîW(xu¿ª)À┬ıµ▓┐ÀÍÍv¢Ôú¼Â°¢Ë¤┬üÝîóò■░l(f¿í)▓╝▀\äËîW(xu¿ª)Á─©¸ÀNÀ┬ıµÀ¢À¿íú
 ÀÁ╗ÏÝö▓┐
ÀÁ╗ÏÝö▓┐ ╦óð┬Ýô├µ
╦óð┬Ýô├µ ¤┬Á¢ÝôÁÎ
¤┬Á¢ÝôÁÎ