

╩▓├┤╩ŪĻP╣ØÖCŲ„╚╦Ż┐
ĻP╣ØÖCŲ„╚╦(Robot joints)Ż¼ę▓ĘQĻP╣Ø╩ų▒█ÖCŲ„╚╦╗“ĻP╣ØÖCąĄ╩ų▒█Ż¼╩Ū«öĮ±╣żśIŅIė“ųąūŅ│ŻęŖĄ─╣żśIÖCŲ„╚╦Ą─ą╬æBų«ę╗ĪŻ▀m║Žė├ė┌ųTČÓ╣żśIŅIė“Ą─ÖCąĄūįäė╗»ū„śIŻ¼▒╚╚ńŻ¼ūįäėčb┼õĪóćŖŲßĪó░ß▀\Īó║ĖĮėĄ╚╣żū„ĪŻ
ĻP╣ØÖCŲ„╚╦Ą─ĘųŅÉ
ĻP╣ØÖCŲ„╚╦Ą─ö[äėĘĮŽ“ėąŃU┤╣ĘĮŽ“║═╦«ŲĮĘĮŽ“ā╔ĘNŻ¼ę“┤╦▀@ŅÉÖCŲ„╚╦ėų┐╔Ęų×ķ┤╣ų▒ĻP╣ØÖCŲ„╚╦║═╦«ŲĮĻP╣ØÖCŲ„╚╦ĪŻ
┤╣ų▒ĻP╣ØÖCŲ„╚╦╚ń╔ŽłD╦∙╩ŠŻ¼─ŻöM┴╦╚╦ŅÉĄ─╩ų▒█╣”─▄Ż¼ė╔┤╣ų▒ė┌Ąž├µĄ─č³▓┐ą²▐D▌S(ŽÓ«öė┌┤¾▒█ą²▐DĄ─╝ń▓┐ą²▐D▌S)ĦäėąĪ▒█ą²▐DĄ─ųŌ▓┐ą²▐D▌Sęį╝░ąĪ▒█Ū░Č╦Ą─╩ų═¾Ą╚śŗ│╔ĪŻ╩ų═¾═©│Żė╔2Ī½3éĆūįė╔Č╚śŗ│╔ĪŻŲõäėū„┐šķgĮ³╦Ųę╗éĆŪ“¾wŻ¼╦∙ęįę▓ĘQČÓĻP╣ØŪ“├µÖCŲ„╚╦ĪŻ
Ųõā׳c╩Ū┐╔ęįūįė╔ĄžīŹ¼F╚²ŠS┐šķgĄ─Ė„ĘNū╦ä▌Ż¼┐╔ęį╔·│╔Ė„ĘNÅ═ļsą╬ĀŅĄ─▄ē█EĪŻŽÓī”ÖCŲ„╚╦Ą─░▓čb├µĘeĪŻŲõäėū„ĘČć·║▄īÆĪŻ
╚▒³c╩ŪĮYśŗäéČ╚▌^Ą═Ż¼äėū„Ą─Į^ī”╬╗ų├Š½Č╚─ź▌^Ą═ĪŻ╦³ÅVĘ║æ¬ė├ė┌┤·╠µ╚╦═Ļ│╔čb┼õū„śIĪóžø╬’░ß▀\ĪóļŖ╗Ī║ĖĮėĪóćŖ═┐Īó³c║ĖĮėĄ╚ū„śIł÷║ŽĪŻ
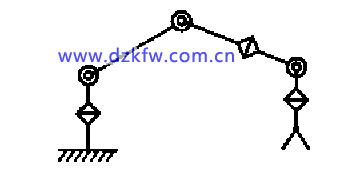
╦«ŲĮĻP╣ØÖCŲ„╚╦╚ń╔ŽłDį┌ĮYśŗ╔ŽŠ▀ėą┤«┬ō┼õų├Ą─Č■éĆ─▄ē“į┌╦«ŲĮ├µā╚ą²▐DĄ─╩ų▒█Ż¼Ųõūįė╔Č╚┐╔ęįĖ∙ō■ė├═Š▀xō±2Ī½4éĆŻ¼äėū„┐šķg×ķę╗łAų∙¾wĪŻ
╦«ŲĮĻP╣ØÖCŲ„╚╦Ą─ā׳c╩Ūį┌┤╣ų▒ĘĮŽ“╔ŽĄ─äéąį║├Ż¼─▄ĘĮ▒ŃĄžīŹ¼FČ■ŠSŲĮ├µ╔ŽĄ─äėū„Ż¼į┌čb┼õū„śIųąĄ├ĄĮŲš▒ķæ¬ė├ĪŻ
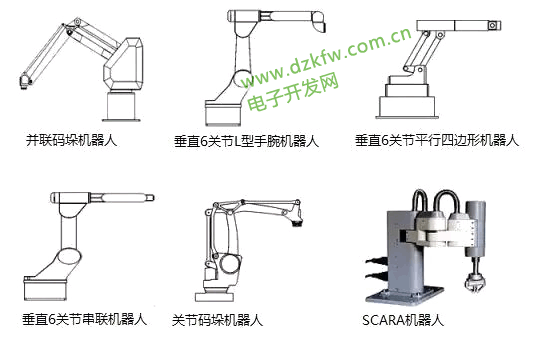
┤╦═ŌŻ¼▀Ć┐╔ęį ░┤ššĻP╣ØÖCŲ„╚╦Ą─╣żū„ąį┘|ĘųŅÉŻ¼┐╔Ęų×ķ║▄ČÓĘNŻ¼▒╚╚ńŻ║░ß▀\ÖCŲ„╚╦Ż¼³c║ĖÖCŲ„╚╦Ż¼╗Ī║ĖÖCŲ„╚╦Ż¼ćŖŲßÖCŲ„╚╦Ż¼╝ż╣ŌŪąĖŅÖCŲ„╚╦Ą╚ĪŻ
ĻP╣ØÖCŲ„╚╦Ą─ā×╚▒³c
ĻP╣ØÖCŲ„╚╦Ą─ā׳c
1)ĮYśŗŠo£ÉŻ¼╣żū„ĘČć·┤¾Č°░▓čbš╝Ąž├µĘeąĪĪŻ
2)Š▀ėą║▄Ė▀Ą─┐╔▀_ąįĪŻĻP╣Øū°ś╦╩ĮÖCŲ„╚╦┐╔ęį╩╣Ųõ╩ų▓┐▀M╚ļŽ±Ų¹▄ć▄ć╔Ē▀@śėę╗éĆĘŌķ]Ą─┐šķgā╚▀Mąąū„śIŻ¼Č°ų▒ĮŪū°ś╦╩ĮÖCŲ„╚╦▓╗─▄▀Mąą┤╦ŅÉū„śIĪŻ
3)ę“×ķø]ėąęŲäėĻP╣ØŻ¼╦∙ęį▓╗ąĶę¬ī¦▄ēĪŻ▐DäėĻP╣Ø╚▌ęū├▄ĘŌŻ¼ė╔ė┌▌S│ą╝■╩Ū┤¾┴┐╔·«aĄ─ś╦£╩╝■Ż¼ät─”▓┴ąĪŻ¼æTąįąĪŻ¼┐╔┐┐ąį║├ĪŻ
4)╦∙ąĶĻP╣Ø“īäė┴”ŠžąĪŻ¼─▄┴┐Ž¹║─▌^ąĪĪŻ
5)┤·╠µ║▄ČÓ▓╗▀m║Ž╚╦┴”═Ļ│╔Īóėą║”╔Ē¾wĮĪ┐ĄĄ─Å═ļs╣żū„ĪŻ
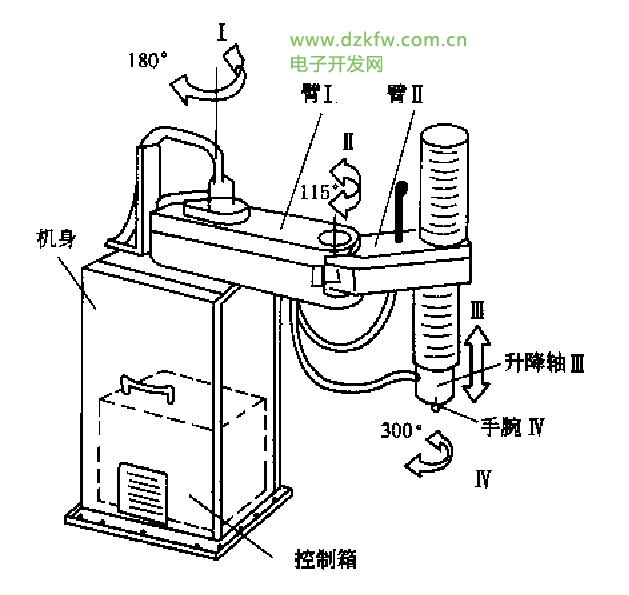
ĻP╣ØÖCŲ„╚╦Ą─╚▒³c
1)ųŌĻP╣Ø║═╝ńĻP╣Ø▌SŠĆ╩ŪŲĮąąĄ─Ż¼«ö┤¾ĪóąĪ▒█╩µš╣│╔ę╗ų▒ŠĆĢrŻ¼ļm─▄Ąų▀_║▄▀hĄ─╣żū„³cŻ¼Ą½ÖCŲ„╚╦Ą─ĮYśŗäéČ╚▒╚▌^Ą═ĪŻ
2)ÖCŲ„╚╦╩ų▓┐į┌╣żū„ĘČć·▀ģĮń╔Ž╣żū„Ģrėą▀\äėīW╔ŽĄ─═╦╗»ąą×ķĪŻ
3)ārĖ±Ė▀Ż¼ī¦ų┬│§Ų┌═Č┘YĄ─│╔▒ŠĖ▀ĪŻ
┴∙▌SĻP╣ØÖCŲ„╚╦Ą─▀\äėĘĮ╩Į
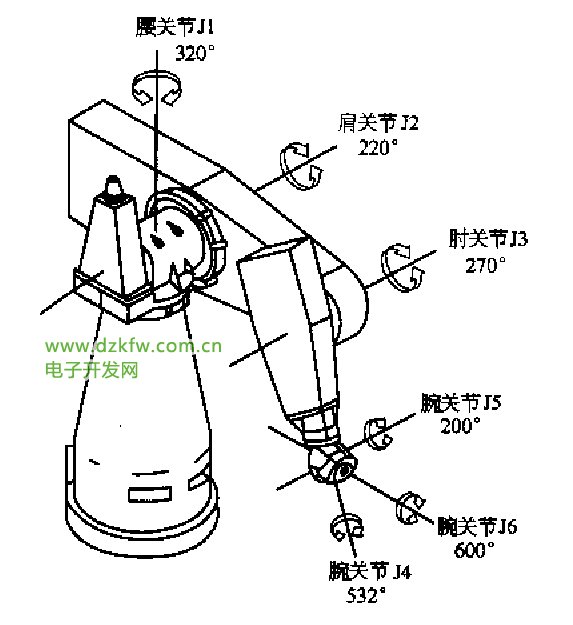
┴∙▌S╣żśIÖCŲ„╚╦ū„×ķ╣żśIÖCŲ„╚╦ųąæ¬ė├ųąūŅ×ķÅVĘ║Ą─ŅÉą═Ż¼Š▀ėąĖ▀ņ`╗ŅąįĪó│¼┤¾žō▌dĪóĖ▀Č©╬╗Š½Č╚Ą╚▒ŖČÓā׳cĪŻ─Ū┴∙éĆ▌SĄ─Ė„ūį▀\äė┬ĘÅĮ╚ń║╬Ż¼ęįFANUC robot R-2000 iBüĒ▀Mąąįö╝ÜĮŌūxĪŻ
J1ą²▐D(S▌S)
J2Ž┬▒█(L▌S)

J3╔Ž▒█(U▌S)
J4╩ų═¾ą²▐D(R▌S)
J5╩ų═¾ö[äė(B▌S)
J6╩ų═¾╗ž▐D(T▌S)
įö╝Ü┴╦ĮŌ┴∙ĻP╣ØÖCŲ„╚╦įö╝Ü▀\äėĘĮ╩Į║═Ųõæ¬ė├ŅIė“šł┤┴Ž┬ĘĮęĢŅlŻ║
┴∙▌SĻP╣ØÖCŲ„╚╦Ą─ÖCąĄĮYśŗ
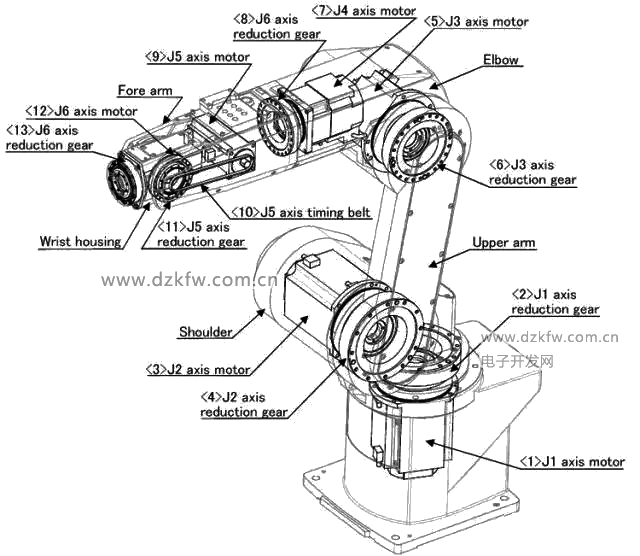
╔ŽłD×ķ│ŻęŖĄ─┴∙▌SĻP╣ØÖCŲ„╚╦Ą─ÖCąĄĮYśŗŻ¼┴∙éĆ╦┼Ę■ļŖÖCų▒Įė═©▀^£p╦┘Ų„Īó═¼▓ĮĦ▌åĄ╚“īäė┴∙éĆĻP╣Ø▌SĄ─ą²▐DĪŻ┴∙▌S╣żśIÖCŲ„╚╦ę╗░Ńėą6éĆūįė╔Č╚Ż¼│ŻęŖĄ─┴∙▌S╣żśIÖCŲ„╚╦░³║¼ą²▐D(S▌S)Ż¼Ž┬▒█(L▌S)Īó╔Ž▒█(U▌S)Īó╩ų═¾ą²▐D(R▌S)Īó╩ų═¾ö[äė(B▌S)║═╩ų═¾╗ž▐D(T▌S)ĪŻ6éĆĻP╣Ø║Ž│╔īŹ¼F─®Č╦Ą─6ūįė╔Č╚äėū„ĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū