
SMARTĄ─ā╔ĘN▀\äė┐žųŲĘĮ╩ĮŻ║═©ą┼Ą─ĘĮ╩Į║═├}ø_Ą─ĘĮ╩ĮĪŻŲõųąŻ¼├}ø_Ą─ĘĮ╩Į╩ŪųĖS7-200 SMART CPU░l╦═š╝┐š▒╚×ķ50%Ą─├}ø_ą┼╠¢Įo▓Į▀M/╦┼Ę■“īäėŲ„Ż¼Å─Č°“īäė▓Į▀M/╦┼Ę■ļŖÖC▀Mąą▀\äėĪŻ
▀@ĘNš╝┐š▒╚×ķ50%Ą─├}ø_ą┼╠¢ę▓ĘQ×ķPTOą┼╠¢ĪŻPTO╩Ūėó╬─"Pulse Train Output"Ą─┐sīæŻ¼ųą╬─ĘŁūg×ķ"├}ø_┤«▌ö│÷"ĪŻPTOą┼╠¢┐╔ęįė├üĒ▀Mąą╦┘Č╚╗“š▀ĘĮŽ“Ą─┐žųŲŻ¼Ė∙ō■▌ö│÷├}ø_ą┼╠¢ŽÓ╬╗Ą─▓╗═¼Ż¼┐╔ęįėą╚ńŽ┬ÄūĘNĮM║ŽŻ║
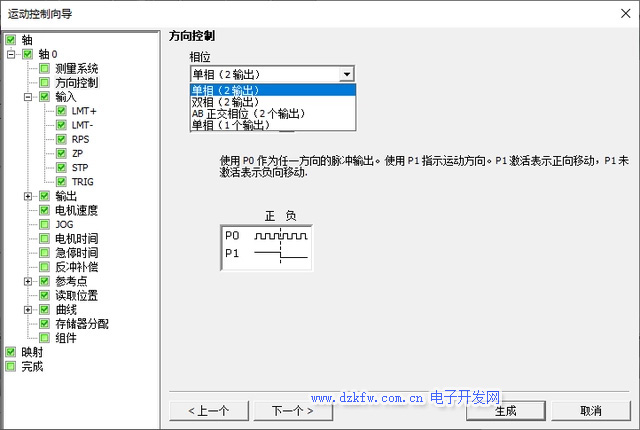
1Ż®Īóå╬ŽÓ├}ø_ą┼╠¢Ż©2┬Ę▌ö│÷Ż®Ż╗
2Ż®ĪóļpŽ“├}ø_ą┼╠¢Ż©2┬Ę▌ö│÷Ż®Ż╗
3Ż®ĪóABš²Į╗ŽÓ├}ø_ą┼╠¢Ż©2┬Ę▌ö│÷Ż®Ż╗
4Ż®Īóå╬ŽÓ├}ø_ą┼╠¢Ż©1┬Ę▌ö│÷Ż®Ż╗
ŲõųąŻ¼Ū░╚²ĘN┐╔ęįĖ∙ō■īŹļHŪķør▀xō±▓╗═¼Ą─śOąįĪŻŻ©╦∙ėą▀@ą®┼õų├┐╔ęįį┌▀\äė┐žųŲ├µ░Õųą▀xō±Ż¼║¾└m╬ęéāĢ■ĮķĮB▀\äė┐žųŲ├µ░ÕŻ®ĪŻ
Ž┬├µ╬ęéāüĒŠ▀¾wĮķĮBŽ┬Ż║
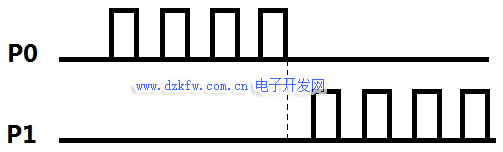
1Īóå╬ŽÓ├}ø_ą┼╠¢Ż©2┬Ę▌ö│÷Ż®
Ū░├µ╬ęéāĮķĮB▀^Ż¼├┐éĆ▀\äė▌Sėą╚²éĆ▌ö│÷ą┼╠¢Ż║P0ĪóP1║═DISą┼╠¢ĪŻ
å╬ŽÓ├}ø_ą┼╠¢Ż©2┬Ę▌ö│÷Ż®╩ŪųĖė├P0üĒ▌ö│÷├}ø_ą┼╠¢Ż¼ė├P1üĒųĖ╩ŠĘĮŽ“ą┼╠¢ĪŻ
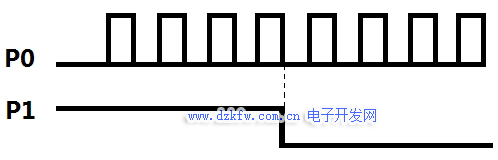
ĘĮŽ“ą┼╠¢┐╔ęį▀xō±▓╗═¼Ą─śOąįŻ║
«öśOąį×ķš²ĢrŻ¼P1×ķĖ▀ļŖŲĮ╩╣ļŖÖCš²▐DŻ¼P1×ķĄ═ļŖŲĮ╩╣ļŖÖCĘ┤▐DŻ╗
«öśOąį×ķžōĢrŻ¼P1×ķĖ▀ļŖŲĮ╩╣ļŖÖCĘ┤▐DŻ¼P1 ×ķĄ═ļŖŲĮ╩╣ļŖÖCš²▐DŻ╗
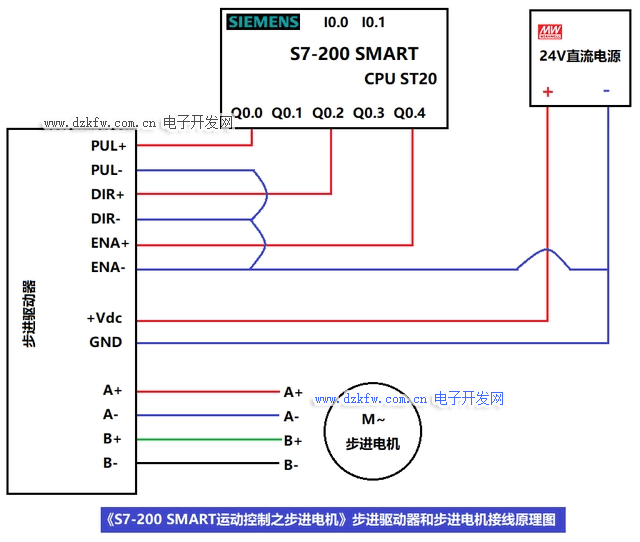
įō┐žųŲĘĮ╩ĮĄ─├}ø_ą┼╠¢╩ŠęŌłD╚ńŽ┬Ż║
▀@ĘNĘĮ╩Į╩Ū╩╣ė├▒╚▌^ČÓĄ─┐žųŲĘĮ╩ĮŻ¼╬ęéāŪ░ę╗Ų¬╬─š┬ĮķĮB▒Ššn│╠Ą─ė▓╝■ĮėŠĆłDĢrŻ¼Š═╩ŪīóQ0.0(P0)▀BĮėĄĮ▓Į▀M“īäėŲ„Ą─├}ø_▌ö╚ļĮėŠĆČ╦ūėŻ¼īóQ0.2(P1)▀BĮėĄĮĘĮŽ“┐žųŲĮėŠĆČ╦ūėŻ¼╚ń╣¹═³ėø┴╦┐╔ęį╗ž╚ź┐┤ę╗Ž┬ĪŻų┴ė┌ĘĮŽ“ą┼╠¢Ą─śOąį┐╔ęįŽ╚▓╗╣▄╦³Ż¼Ą╚īŹļH═©ļŖš{įć╚ń╣¹░l¼FļŖÖCĄ─▐DŽ“┼cūį╝║ę¬Ū¾Ą─▓╗Ę¹║ŽŻ¼ų╗ꬹ▐Ė─Ž┬śOąįĄ─š²žōŠ═║├┴╦ĪŻė▓╝■ĮėŠĆłD╚ńŽ┬Ż║
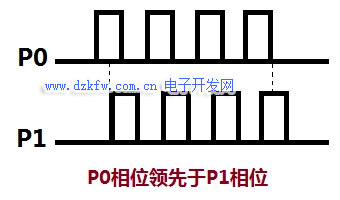
2ĪóļpŽÓ├}ø_ą┼╠¢Ż©2┬Ę▌ö│÷Ż®
įōĘĮ╩ĮŽ┬P0║═P1Š∙▌ö│÷PTO├}ø_ą┼╠¢Ż¼Ą½▒Ē╩Š▓╗═¼Ą─ĘĮŽ“ĪŻ
«öśOąį×ķš²ĢrŻ║P0▌ö│÷Ą─├}ø_öĄė├ė┌┐žųŲļŖÖCš²▐DŻ¼P1▌ö│÷Ą─├}ø_ė├ė┌┐žųŲļŖÖCĘ┤▐DŻ╗
«öśOąį×ķžōĢrŻ║P0▌ö│÷Ą─├}ø_öĄė├ė┌┐žųŲļŖÖCĘ┤▐DŻ¼P1▌ö│÷Ą─├}ø_ė├ė┌┐žųŲļŖÖCš²▐DŻ╗
įō┐žųŲĘĮ╩ĮĄ─├}ø_ą┼╠¢╩ŠęŌłD╚ńŽ┬Ż║
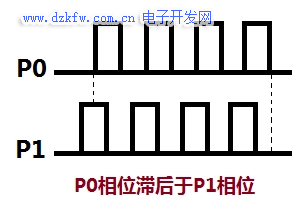
3ĪóA/Bš²Į╗ŽÓ├}ø_ą┼╠¢Ż©2┬Ę▌ö│÷Ż®
įōĘĮ╩ĮŽ┬P0║═P1ęįŽÓ═¼Ą─╦┘┬╩░l│÷├}ø_ą┼╠¢Ż¼ļŖÖCĄ─▐DŽ“ė╔P0║═P1Ą─ŽÓ╬╗øQČ©ĪŻ
«öśOąį×ķš²ĢrŻ║╚¶P0Ą─ŽÓ╬╗ŅIŽ╚ė┌P1Ą─ŽÓ╬╗Ż¼ļŖÖCš²▐DŻ╗╚¶P0Ą─ŽÓ╬╗£■║¾P1Ą─ŽÓ╬╗Ż¼ätļŖÖCĘ┤▐DŻ╗
«öśOąį×ķžōĢrŻ║╚¶P0Ą─ŽÓ╬╗ŅIŽ╚ė┌P1Ą─ŽÓ╬╗Ż¼ļŖÖCĘ┤▐DŻ╗╚¶P0Ą─ŽÓ╬╗£■║¾P1Ą─ŽÓ╬╗Ż¼ätļŖÖCš²▐DŻ╗
įō┐žųŲĘĮ╩ĮĄ─├}ø_ą┼╠¢╩ŠęŌłD╚ńŽ┬Ż║
4Īóå╬ŽÓ├}ø_ą┼╠¢Ż©1┬Ę▌ö│÷Ż®
įōĘĮ╩ĮŽ┬āHėąP0Ž“═Ō░l╦═├}ø_Ż¼ų╗─▄▀Mąąę╗éĆĘĮŽ“Ą─▀\äė┐žųŲŻ╗╚ńŽ┬łD╦∙╩ŠŻ║
║├┴╦Ż¼ĻPė┌S7-200SMART▌ö│÷PTO├}ø_ą┼╠¢Ą─ĘĮ╩ĮŠ═Ž╚ĮķĮBĄĮ▀@└’Ż¼║¾└m╬ęéāĢ■ĮķĮB▀\äė┐žųŲ├µ░ÕĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū