
šf├„Ż║╚ń╣¹SRĄ─S▌ö╚ļČ╦Ą─ą┼╠¢ĀŅæB×ķĪ░1Ī▒Ż¼R▌ö╚ļČ╦Ą─ą┼╠¢ĀŅæB×ķĪ░0Ī▒Ż¼ätų├╬╗SR(Å═╬╗ā׎╚ą═SRļpĘĆæBė|░lŲ„)ĪŻĘ±ätŻ¼╚ń╣¹S▌ö╚ļČ╦Ą─ą┼╠¢ĀŅæB×ķĪ░0Ī▒Ż¼R▌ö╚ļČ╦Ą─ą┼╠¢ĀŅæB×ķĪ░1Ī▒Ż¼ätÅ═╬╗ė|░lŲ„ĪŻ╚ń╣¹ā╔éĆ▌ö╚ļČ╦Ą─RLOŠ∙×ķĪ░1Ī▒Ż¼ätųĖ┴ŅĄ─ł╠ąąĒśą“╩ŪūŅųžę¬Ą─ĪŻSRė|░lŲ„Ž╚į┌ųĖČ©<ĄžųĘ>ł╠ąąų├╬╗ųĖ┴ŅŻ¼╚╗║¾ł╠ąąÅ═╬╗ųĖ┴ŅŻ¼ęį╩╣įōĄžųĘį┌ł╠ąąėÓŽ┬Ą─│╠ą“Æ▀├Ķ▀^│╠ųą▒Ż│ųÅ═╬╗ĀŅæBĪŻų╗ėąį┌RLO×ķĪ░1Ī▒ĢrŻ¼▓┼Ģ■ł╠ąąS(ų├╬╗)║═R(Å═╬╗)ųĖ┴ŅĪŻ▀@ą®ųĖ┴Ņ▓╗╩▄RLOĪ░0Ī▒Ą─ė░ĒæŻ¼ųĖ┴ŅųąųĖČ©Ą─ĄžųĘ▒Ż│ų▓╗ūāĪŻ
MCR (ų„┐ž└^ļŖŲ„)ę└┤µĻPŽĄ
ų╗ėąīóSRė|░lŲ„ų├ė┌╝ż╗ŅĄ─MCRģ^ā╚ĢrŻ¼▓┼Ģ■╝ż╗ŅMCRę└┤µĻPŽĄĪŻį┌╝ż╗ŅĄ─MCRģ^ā╚Ż¼╚ń╣¹MCR╠Äė┌Įė═©ĀŅæBŻ¼ät░┤ęį╔Ž╦∙╩÷īóīżųĘ╬╗ų├╬╗×ķĪ░1Ī▒╗“Å═╬╗×ķĪ░0Ī▒ĪŻ╚ń╣¹MCR╠Äė┌ĻPķ]ĀŅæBŻ¼ät¤ošō▌ö╚ļĀŅæB╚ń║╬Ż¼ųĖČ©ĄžųĘĄ─«öŪ░ĀŅæBŠ∙▒Ż│ų▓╗ūāĪŻ
ĀŅæBūųŻ║
| BR | CC 1 | CC 0 | OV | OS | OR | STA | RLO | /FC | |
| īæŻ║ | - | - | - | - | - | X | X | X | 1 |
īŹ└²Ż║
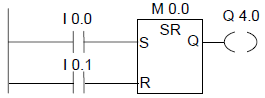
╚ń╣¹▌ö╚ļČ╦I0.0Ą─ą┼╠¢ĀŅæB×ķĪ░1Ī▒Ż¼I0.1Ą─ą┼╠¢ĀŅæB×ķĪ░0Ī▒Ż¼ätų├╬╗┤µā”Ų„╬╗M0.0Ż¼▌ö│÷Q4.0īó╩ŪĪ░1Ī▒ĪŻĘ±ätŻ¼╚ń╣¹▌ö╚ļČ╦I0.0Ą─ą┼╠¢ĀŅæB×ķĪ░0Ī▒Ż¼I0.1Ą─ą┼╠¢ĀŅæB×ķĪ░1Ī▒Ż¼ätÅ═╬╗┤µā”Ų„╬╗M0.0Ż¼▌ö│÷Q4.0īó╩ŪĪ░0Ī▒ĪŻ╚ń╣¹ā╔éĆą┼╠¢ĀŅæBŠ∙×ķĪ░0Ī▒Ż¼ät▓╗Ģ■░l╔·╚╬║╬ūā╗»ĪŻ╚ń╣¹ā╔éĆą┼╠¢ĀŅæBŠ∙×ķĪ░1Ī▒Ż¼īóę“Ēśą“ĻPŽĄł╠ąąÅ═╬╗ųĖ┴ŅŻ╗Å═╬╗M0.0Ż¼Q4.0īó╩ŪĪ░0Ī▒ĪŻ
╚ń╣¹īŹ└²į┌╝ż╗ŅĄ─MCRģ^ų«ā╚Ż║
MCR╠Äė┌┤“ķ_ĀŅæBĢrŻ¼īó░┤ęį╔Ž╦∙╩÷ų├╬╗╗“Å═╬╗Q4.0Ż╗MCR╠Äė┌ĻPķ]ĀŅæBĢrŻ¼¤ošō▌ö╚ļĀŅæB╚ń║╬Ż¼Q4.0Š∙▒Ż│ų▓╗ūāĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū