
ĪĪĪĪį┌▒Š╬─ųąŻ¼å╬Ų¼ÖC(j©®)ķ_░l(f©Ī)╣ż│╠ĤéāĘųŽĒ┴╦ę╗éĆ╩╣ė├PICå╬Ų¼ÖC(j©®)ķ_░l(f©Ī)Ą─▒╗äė╝t═ŌŻ©PIRŻ®é„ĖąŲ„─ŻēKĄ─ł¾Š»Ų„ĪŻį┌▀@éĆĘĮ░ĖųąŻ¼╬ęéā╩╣ė├PIC12F635å╬Ų¼ÖC(j©®)▀M(j©¼n)ąąķ_░l(f©Ī)Ż¼│ų└m(x©┤)▒O(ji©Īn)┐žé„ĖąŲ„─ŻēKĄ─▌ö│÷Ż¼▓óį┌Ųõ╝ż╗ŅĢr┤“ķ_Ęõ°QŲ„ĪŻ
ĪĪĪĪę╗Īó▒╗äė╝t═ŌŻ©PIRŻ®ł¾Š»Ų„ĘĮ░ĖĄ─įŁ└Ē
ĪĪĪĪ─│ą®░ļī¦(d©Żo)¾w▓─┴ŽŠ▀ėą▒®┬Čė┌¤ß╝t═Ō▌Ś╔õĢrĢ■«a(ch©Żn)╔·▒Ē├µļŖ║╔Ą─╠žąįĪŻ▀@ĘN¼F(xi©żn)Ž¾ĘQ×ķ¤ßļŖĪŻ▒╗äė╝t═ŌŻ©PIRŻ®é„ĖąŲ„─ŻēKĄ─╣żū„įŁ└ĒŽÓ═¼ĪŻ╚╦¾węį╝t═ŌŠĆ▌Ś╔õĄ─ą╬╩Į▌Ś╔õ¤ß┴┐Ż¼ūŅ┤¾╝s×ķ9.4╬ó├ūĪŻ╚╦¾wĄ─┤µį┌Ģ■ī¦(d©Żo)ų┬¤ßßīļŖé„ĖąŲ„Ėąæ¬(y©®ng)ĄĮĄ─ų▄ć·Łh(hu©ón)Š│Ą─IR▌å└¬░l(f©Ī)╔·═╗╚╗ūā╗»ĪŻPIRé„ĖąŲ„─ŻēKį┌░Õ╔ŽŠ▀ėąāx▒ĒļŖ┬ĘŻ¼įōāx▒ĒļŖ┬Ęīóįōą┼╠¢Ę┼┤¾ĄĮ▀m«ö(d©Īng)?sh©┤)─ļŖē║ļŖŲĮęįųĖ╩Š▀\äėĄ─Öz£yĪŻ
ĪĪĪĪPIRé„ĖąŲ„ąĶę¬┤¾╝s10ĄĮ60├ļĄ─│§╩╝ĘĆ(w©¦n)Č©Ģrķg▓┼─▄š²│Ż▀\ąąĪŻį┌▀@Č╬Ģrķgā╚(n©©i)Ż¼é„ĖąŲ„ę¬╩ņŽżų▄ć·Ą─Łh(hu©ón)Š│Ż¼▓óæ¬(y©®ng)▒▄├ŌŲõęĢę░ā╚(n©©i)Ą─╚╬║╬▀\äėĪŻPIRé„ĖąŲ„Ą─Ąõą═ĘČć·×ķ6├ūŻ¼ŲõįO(sh©©)ėŗų╝į┌▀mæ¬(y©®ng)ŠÅ┬²ūā╗»Ą─Śl╝■Ż¼└²╚ńļSų°ĢrķgĄ─┴„╩┼Ż¼ų▄ć·£žČ╚Ęų▓╝Ą─ųØuūā╗»ĪŻĄ½╩ŪŻ¼é„ĖąŲ„Ģ■Ēææ¬(y©®ng)╚╬║╬▌å└¬Ą─═╗╚╗ūā╗»Ż©└²╚ńŻ¼╚╦¾w▀\äėŻ®ĪŻ▀@Š═╩Ū×ķ╩▓├┤▓╗æ¬(y©®ng)īóPIRé„ĖąŲ„─ŻēKĘ┼ų├į┌╝ė¤ßŲ„Ż¼Į╗┴„ļŖį┤▓Õū∙╗“╚╬║╬Ģ■į┌ų▄ć·Łh(hu©ón)Š│ųą«a(ch©Żn)╔·┐ņ╦┘ūā╗»Ą─ĄžĘĮĄ─įŁę“ĪŻ
ĪĪĪĪPIRé„ĖąŲ„─ŻēK═©│ŻŠ▀ėą3ßś▀BĮėŻ║VccŻ¼▌ö│÷║═ĮėĄžĪŻę²─_┼┼┴ą┐╔─▄Ģ■ėą╦∙▓╗═¼Ż¼ę“┤╦╬ęĮ©ūh▓ķ┐┤ųŲįņ╔╠Ą─öĄ(sh©┤)ō■(j©┤)▒Ēęį┤_šJ(r©©n)ę²─_ĪŻėąĢr║“Ż¼╦¹éā┤_īŹį┌░Õ╔Ž┐┐Į³ę²─_Ą─ĄžĘĮėąś╦(bi©Īo)║×ĪŻ╬ę╦∙ōĒėąĄ─ę╗éĆ┐╔ęįū÷ĄĮŻ¼╦³┐╔ęį═©▀^5-12VļŖį┤╣®ļŖŻ¼ę“×ķ╦³Š▀ėąūį╝║Ą─ĘĆ(w©¦n)ē║Ų„ĪŻ«ö(d©Īng)Öz£yĄĮ▀\äėĢrŻ¼▌ö│÷ūāĖ▀ĪŻ
ĪĪĪĪ┤╦═ŌŻ¼╦³▀Ćėą3ßś╠°ŠĆ▀xō±Ż¼┐╔ė├ė┌å╬ė|░l(f©Ī)╗“▀B└m(x©┤)ė|░l(f©Ī)▌ö│÷─Ż╩ĮĪŻ▀@ā╔éĆ╬╗ų├Ħėąś╦(bi©Īo)║×H║═LĪŻ«ö(d©Īng)╠°ŠĆ╬╗ė┌H╬╗ų├ĢrŻ¼«ö(d©Īng)Ę┤Å═(f©┤)ųžą┬ė|░l(f©Ī)é„ĖąŲ„ĢrŻ¼▌ö│÷īó▒Ż│ųĖ▀ļŖŲĮĪŻį┌╬╗ų├LŻ¼├┐┤╬ė|░l(f©Ī)é„ĖąŲ„Ż¼▌ö│÷Š═ūāĖ▀║═ūāĄ═ĪŻę“┤╦Ż¼į┌┤╦─Ż╩ĮŽ┬Ż¼▀B└m(x©┤)▀\äėīó«a(ch©Żn)╔·ųžÅ═(f©┤)Ą─Ė▀/Ą═├}ø_ĪŻé„ĖąŲ„─ŻēKĄ─Ū░▓┐Š▀ėąĘŲ─∙Č·═ĖńRŻ¼┐╔īó╝t═Ō╣ŌŠ█Į╣ĄĮé„ĖąŲ„į¬╝■╔ŽĪŻ
ĪĪĪĪČ■Īó╝t═Ōł¾Š»Ų„ĘĮ░ĖļŖ┬ĘłD
ĪĪĪĪįō╝t═Ōł¾Š»Ų„ĘĮ░ĖĄ─ļŖ┬ĘłDĘŪ│Ż║åå╬Ż¼▀@└’╩╣ė├4╣Ø(ji©”)AAļŖ│ž×ķļŖ┬Ę╣®ļŖŻ¼┐╔╠ß╣®6VļŖį┤ĪŻ┤«┬ō(li©ón)╩╣ė├ę╗éĆČ■śO╣▄īóļŖē║ĮĄų┴5.4VŻ¼ę“×ķPICå╬Ų¼ÖC(j©®)Ą─╣żū„ļŖē║æ¬(y©®ng)Ą═ė┌5.5VĪŻ┤╦═ŌŻ¼į┌ļŖį┤śOąįŽÓĘ┤Ą─ŪķørŽ┬Ż¼įōČ■śO╣▄▀Ć┐╔ęį×ķļŖ┬Ę╠ß╣®▒Żūo(h©┤)ĪŻ╬ęęčĮø(j©®ng)╩╣ė├NI-MH┐╔│õļŖļŖ│žŻ©┐╔╠ß╣®4.8VŻ®ī”ļŖ┬Ę▀M(j©¼n)ąą┴╦£yįćŻ¼▓óŪę┐╔ęįš²│Ż╣żū„Ż¼Ą½╩Ū╬ęĮ©ūh╩╣ė├ēAąįļŖ│žŻ©├┐éĆ1.5VŻ®ęį╠ßĖ▀ąį─▄ĪŻ─Ńę▓┐╔ęį╩╣ė├9VļŖ│žŻ¼Ą½╩ŪļŖ┬ĘųąąĶę¬LM7805ĘĆ(w©¦n)ē║Ų„ICĪŻ
ĪĪĪĪPIRé„ĖąŲ„─ŻēKĄ─▌ö│÷═©▀^PIC12F635Ą─GP5Ż©ę²─_2Ż®▀M(j©¼n)ąą▒O(ji©Īn)┐žĪŻ«ö(d©Īng)Öz£yĄĮ▀\äėĢrŻ¼┤╦▌ö│÷╝s×ķ3.3VŻ©╬ęĄ─é„ĖąŲ„─ŻēKĄ─░Õ╔Žėą3.3VĘĆ(w©¦n)ē║Ų„ICŻ®ĪŻ─Ń╚į╚╗┐╔ęį╩╣ė├įōļŖē║ū„×ķPIC12F635Ą─ėąą¦▀ē▌ŗĖ▀ļŖŲĮŻ¼Ą½╬ęĖ³Ž▓Üg╩╣ė├įōļŖē║üĒ“ī(q©▒)äėNPNŠ¦¾w╣▄Ż©BC547Ż®Ą─╗∙śOŻ¼ęį▒Ńį┌╝»ļŖśO╠Ľ@Ą├▀ē▌ŗļŖē║Ą─═Ļš¹ö[Ę∙ĪŻ¼F(xi©żn)į┌Ż¼å╬Ų¼ÖC(j©®)▒O(ji©Īn)ęĢŠ¦¾w╣▄Ą─╝»ļŖśO╔ŽĄ─ļŖē║ĪŻį┌š²│ŻŪķørŽ┬Ż¼Š¦¾w╣▄Įžų╣Ż¼╝»ļŖśO▌ö│÷×ķ▀ē▌ŗĖ▀ļŖŲĮŻ©+5VŻ®ĪŻ«ö(d©Īng)Öz£yĄĮ▀\äėĢrŻ¼é„ĖąŲ„─ŻēKĄ─Ė▀▌ö│÷╩╣Š¦¾w╣▄’¢║═Ż¼▓óŪę╝»ļŖśO╠ÄĄ─ļŖē║Ž┬ĮĄų┴▀ē▌ŗĄ═ĪŻė|░l(f©Ī)Ų„Ą─╠°ŠĆ▀xō±į┌H╬╗ų├Ż¼ę“┤╦ų╗ę¬▀\äė┤µį┌Ż¼é„ĖąŲ„Ą─▌ö│÷īó▒Ż│ųėąą¦ĪŻūóęŌŻ¼PIC12F635å╬Ų¼ÖC(j©®)╩╣ė├4.0 MHzĄ─ā╚(n©©i)▓┐ĢrńŖį┤ĪŻį┌▒ŠĘĮ░ĖųąŻ¼MCLR╣”─▄▒╗Į¹ė├Ż¼WDT×ķOFFĪŻ
ĪĪĪĪ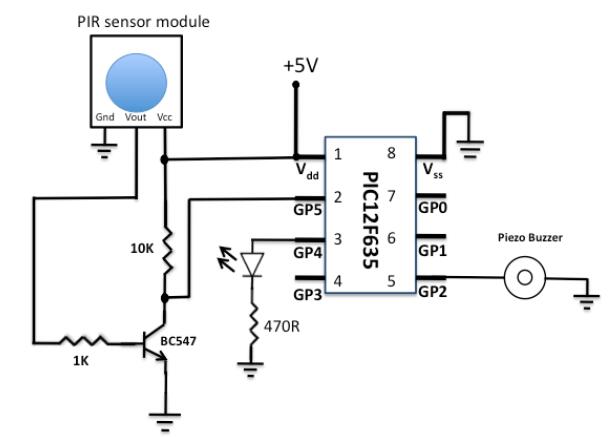
ĪĪĪĪLED═©▀^┤«┬ō(li©ón)Ą─Ž▐┴„ļŖūĶ▀BĮėĄĮČ╦┐┌GP4ĪŻļŖį┤┤“ķ_ĢrŻ¼LEDķWĀq3┤╬ĪŻ▀@▒Ē╩ŠŽĄĮy(t©»ng)ęčåóäėĪŻČ╦┐┌ę²─_GP2“ī(q©▒)äėē║ļŖĘõ°QŲ„ĪŻē║ļŖĘõ°QŲ„į┌ŲõųCš±Ņl┬╩╠Ä╠ß╣®ūŅ┤¾Ą─▌ö│÷┬Ģē║ĪŻ╬ę╩╣ė├Ą─ē║ļŖĘõ°QŲ„╩ŪEFM-290EDŻ¼ŲõųCš±Ņl┬╩×ķ3.4Ī└0.5 KHzĪŻ═µ┴╦ę╗³cų«║¾Ż¼╬ę░l(f©Ī)¼F(xi©żn)ūŅ┤¾Ą─▌ö│÷┬Ģę¶╝s×ķ3725 HzĪŻ▒M╣▄ęÄ(gu©®)ĘČšf╣żū„ļŖē║×ķ7-12VŻ¼Ą½āHė├5V╣®ļŖĢrĢ■«a(ch©Żn)╔·║▄┤¾Ą─┬Ģę¶ĪŻ
ĪĪĪĪįōĘĮ░Ėė├CšZčįŠÄīæŻ¼▓ó╩╣ė├MikroC Pro for PIC▀M(j©¼n)ąąŠÄūgĪŻ╩ū┤╬┤“ķ_ļŖį┤ĢrŻ¼LEDķWĀq3┤╬Ż¼▒Ē├„ŽĄĮy(t©»ng)ęč┤“ķ_ļŖį┤ĪŻ╚╗║¾Ż¼å╬Ų¼ÖC(j©®)Ą╚┤²60├ļńŖŻ¼╚╗║¾ķ_╩╝▒O(ji©Īn)ęĢPIRé„ĖąŲ„▌ö│÷ĪŻąĶę¬ūóęŌĄ─╩ŪŻ¼╩ū┤╬ķ_åóļŖį┤ĢrŻ¼PIRé„ĖąŲ„ąĶę¬┤╦Ą╚┤²ę╗ąĪĢ■Ģrķg▓┼─▄ĘĆ(w©¦n)Č©Ž┬üĒĪŻ«ö(d©Īng)å╬Ų¼ÖC(j©®)Öz£yĄĮé„ĖąŲ„▒╗ė|░l(f©Ī)ĢrŻ¼╦³ęį3725 HzĘĮ▓©“ī(q©▒)äėē║ļŖĘõ°QŲ„ĪŻMikroCŠ▀ėąė├ė┌╔·│╔┬Ģ궥─ā╚(n©©i)ų├ÄņŻ©Sound_PlayŻ©Ż®Ż®ĪŻ┴Ēę╗éĆąĶę¬ūóęŌĄ─å¢Ņ}╩Ū«ö(d©Īng)Ėąæ¬(y©®ng)ĄĮ▀\äėĢr─ŃŽļę¬ūīŠ»ł¾ĒæČÓķLĢrķgŻ¼▀@╚ĪøQė┌─Ńī”å╬Ų¼ÖC(j©®)▀M(j©¼n)ąąŠÄ│╠Ą─įO(sh©©)ų├ĪŻė╔ė┌é„ĖąŲ„╠Äė┌ųžą┬ė|░l(f©Ī)─Ż╩ĮŻ¼ę“┤╦ų╗ę¬│ų└m(x©┤)Ėą£yĄĮ▀\äėŻ¼Ęõ°QŲ„Š═Ģ■▒Ż│ų┤“ķ_ĀŅæB(t©żi)ĪŻ╚ń╣¹▀\äėŽ¹╩¦Ż¼▓óŪęé„ĖąŲ„▌ö│÷ūā?y©Łu)ķ▀ē▌ŗĄ═ļŖŲĮŻ¼ätĘõ°QŲ„▓╗Ģ■┴ó╝┤═Żų╣Ż¼Ą½╚įĢ■┤“ķ_╝s10├ļńŖŻ¼Ą½Ņl┬╩┬įėą▓╗═¼Ż©3570 HzŻ®ĪŻ╚ń╣¹į┘┤╬Öz£yĄĮ▀\äėŻ¼╦³īóęįŲõĘÕųĄųCš±Ņl┬╩Ż©3725 HzŻ®“ī(q©▒)äėē║ļŖĘõ°QŲ„ĪŻ
ĪĪĪĪ╚²Īó╝t═Ōł¾Š»Ų„ĘĮ░Ėį┤┤·┤a
ĪĪĪĪsbit Sensor_IP at GP5_bit; // sensor I/P
ĪĪĪĪsbit LED at GP4_bit; // LED O/P
ĪĪĪĪunsigned short triggerŻ¼ counter;
ĪĪĪĪvoid Get_DelayŻ©Ż®{
ĪĪĪĪDelay_msŻ©300Ż®;
ĪĪĪĪ}
ĪĪĪĪvoid mainŻ©Ż® {
ĪĪĪĪCMCON0 = 7;
ĪĪĪĪTRISIO = 0b00101000; // GP5Ż¼ 5 I/PĪ«sŻ¼ Rest O/PĪ»s
ĪĪĪĪGPIO = 0;
ĪĪĪĪSound_InitŻ©&GPIOŻ¼2Ż®;
ĪĪĪĪ// Blink LED at Startup
ĪĪĪĪLED = 1;
ĪĪĪĪGet_DelayŻ©Ż®;
ĪĪĪĪLED = 0;
ĪĪĪĪGet_DelayŻ©Ż®;
ĪĪĪĪLED = 1;
ĪĪĪĪGet_DelayŻ©Ż®;
ĪĪĪĪLED = 0;
ĪĪĪĪGet_DelayŻ©Ż®;
ĪĪĪĪLED = 1;
ĪĪĪĪGet_DelayŻ©Ż®;
ĪĪĪĪLED = 0;
ĪĪĪĪDelay_msŻ©60000Ż®; // 45 Sec delay for PIR module stabilizaTIon
ĪĪĪĪcounter = 0;
ĪĪĪĪtrigger = 0;
ĪĪĪĪdo {
ĪĪĪĪwhile Ż©ŻĪSensor_IPŻ® { // Sensor I/P Low
ĪĪĪĪSound_PlayŻ©3725Ż¼ 600Ż®;
ĪĪĪĪDelay_msŻ©500Ż®;
ĪĪĪĪtrigger = 1;
ĪĪĪĪcounter = 0;
ĪĪĪĪ}
ĪĪĪĪif Ż©triggerŻ® {
ĪĪĪĪSound_PlayŻ©3570Ż¼ 600Ż®;
ĪĪĪĪDelay_msŻ©500Ż®;
ĪĪĪĪcounter = counter+1;
ĪĪĪĪifŻ©counter == 10Ż® trigger=0;
ĪĪĪĪ}
ĪĪĪĪ}whileŻ©1Ż®;
ĪĪĪĪ} // End mainŻ©Ż®
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū