
1)步距角α
每給一個脈沖信號,電機轉子轉過角度的理論值。
![]()
其中,m為定子相數;z為轉子齒數;k為通電系數,m相m拍,k=1;m相2m拍,k=2。
α一般很小,如:3°/1.5°,1.5°/0.75°,0.72°/0.36°等
2)矩角特性、最大靜態轉矩Mjmax和啟動轉矩Mq
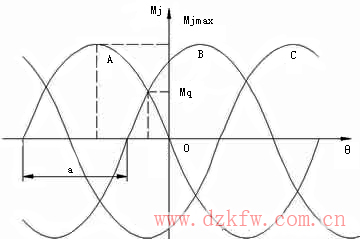
靜態:步進電機處于通電狀態,轉子處在不動狀態。
靜態轉矩Mj:在電機軸上施加一個負載轉矩M,轉子會在載荷方向上轉過一個角度θ(失調角),轉子因而受到一個電磁轉矩Mj的作用與負載平衡。
矩角特性:步進電機單相通電的靜態轉矩Mj隨失調角θ的變化曲線。
3)啟動頻率fq和啟動時的慣頻特性
啟動頻率或突跳頻率fq:空載時,步進電機由靜止突然啟動并進入不丟步的正常運行狀態所允許的最高頻率。高于啟動頻率,將不能正常起動。
啟動時的慣頻特性:是指電機帶動純慣性負載時啟動頻率和負載轉動慣量之間的關系。
步進電機在帶負載(尤其是慣性負載)下的啟動頻率比空載要低。
4)運行矩頻特性
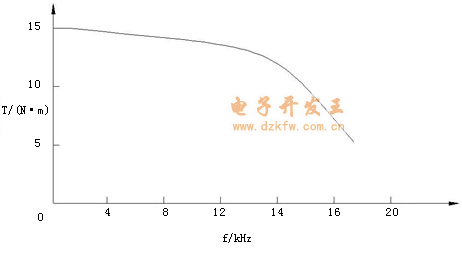
連續運行頻率:步進電機啟動后,其運行速度能跟蹤指令脈沖頻率連續上升而不丟步的最高工作頻率。其值遠大于啟動頻率。
運行矩頻特性:是描述步進電機在連續運行時,輸出轉矩與連續運行頻率之間的關系。
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底